【ニュースリリース】外乱に対する予測的姿勢制御の神経メカニズムを解明 ~ラットは1秒未来の自己の姿勢を予測~
2021年11月25日
ポイント
- ・運動時に身体に加わる外乱(乱れの原因となる外部からの力)を予測して姿勢を制御・安定化する神経のメカニズムを明らかにするため、ラットを用いた新規の姿勢実験課題を構築するとともに数理シミュレーションを行いました。
- ・床が傾斜する外乱に十分に適応学習したラットは、約1秒未来までの間に自分自身がどう動くかを計算しながら、それが目標とする動きに一致するよう発揮筋力を計算していることが示唆されました。
- ・今回確立したラットの実験系と理論的枠組みを応用することで、従来のヒトを被験者とした研究では解明できなかった、予測的姿勢制御の詳細な神経メカニズムが明らかにされることが期待されます。その成果は、日常動作やスポーツにおけるパフォーマンスの向上のみならず、姿勢や運動機能の障害を伴う脳疾患のための創薬やリハビリテーション法の開発につながると期待されます。
概要
多くの日常動作やスポーツ動作では、身体に加わる外乱(乱れの原因となる外部からの力)や神経伝達の遅れなどに起因する身体の乱れに対処するため、それらを予測しながら姿勢を制御・安定化することが必要です。ヒトを被験者とした先行研究により、小脳などを代表とする複数の脳領域がこの予測的姿勢制御に寄与することが示唆されてきましたが、詳細な神経機構は明らかではありませんでした。
東京大学大学院総合文化研究科の鴻巣暁助教および柳原大教授、電気通信大学大学院情報理工学研究科の舩戸徹郎准教授らの研究グループは、ラットにおける新規の姿勢制御課題を構築し、得られた運動データを「モデル予測制御(注1)」に基づく数理シミュレーションと比較しました。その結果、床傾斜外乱に十分適応したラットは、現在時刻から約1秒未来までの間の自分自身の動きを予測しながら、その動きが目標とする動きに一致するよう発揮筋力を計算していることが明らかとなりました。
本研究により、外乱に対する予測的制御の神経メカニズムを解明するための新たな実験系と数理シミュレーションによる仮想的な実験系が確立されました。ラットを用いることで、従来のヒトを被験者とした研究では成しえなかった、中枢神経系の薬理学的機能阻害やニューロン活動の記録といったアプローチが可能となり、日常動作やスポーツにおけるパフォーマンスの向上、脳疾患患者のための創薬およびリハビリテーション法の開発等に寄与する研究が、今後飛躍的に進展するものと期待されます。
本研究成果は2021年11月25日(中央ヨーロッパ時間)に「Frontiers in Systems Neuroscience」誌に掲載されました。
本研究は科研費「新学術領域研究(JP19H05728)」、「基盤研究(C)(JP18K10955、JP21K03932)」、「若手研究(JP20K19592)」、「国際共同研究加速基金(国際共同研究強化(B)(JP20KK0226)」の支援により実施されました。
発表雑誌
- 雑誌名:Frontiers in Systems Neuroscience
- 論文タイトル:A model of predictive postural control against floor tilting in rats
- 著者:Akira Konosu, Tetsuro Funato*, Yuma Matsuki, Akihiro Fujita, Ryutaro Sakai, Dai Yanagihara*
- DOI番号:10.3389/fnsys.2021.785366
用語解説
-
(注1)モデル予測制御
- 現在時刻から有限時間未来までの時間区間において被制御量が目標量に一致するよう最適化計算を行い、制御入力を逐次決定する制御方式。1970年代後半に開発され、現在は自動車、航空機、エネルギーマネージメントシステムなど幅広い産業分野に応用されている。
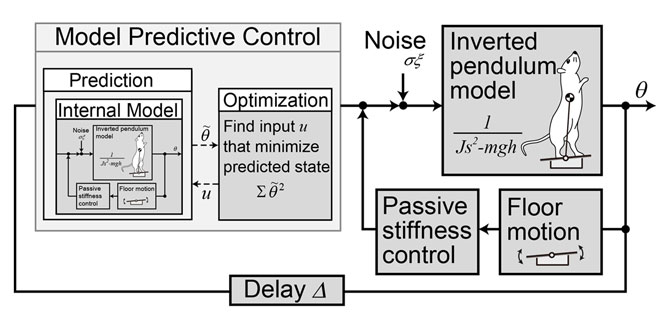
予測を伴うラットの姿勢制御のシステム
詳細は下記PDFをご覧ください。