【ニュースリリース】独立制御可能な「第6の指」を身体化することに成功
2022年02月15日
ポイント
*人間の手に装着し、他の身体部位と独立に動かせる人工指- sixth finger -を初めて開発
*使用に短時間慣れることで、自身の身体の一部と感じる(身体化する)ことが可能
*人間の身体拡張の可能性を実験的に実証
概要
大学院情報理工学研究科の梅沢昂平氏(当時大学院生)、鈴木悠汰氏(当時大学院生)、宮脇陽一教授(機械知能システム学専攻)らは、フランス国立科学研究センター(CNRS)のGowrishankar Ganesh主任研究員と共同で、他の身体の部分と独立して動かすことができる人工身体部位である"sixth finger"を開発し、自らの身体の一部として取り込む(身体化する)実験に成功しました。
私たちの脳は、身体の変化にとても柔軟に対応できることが知られています。では、私たちが生得的に持たない身体部位が人工的に与えられたときでも、それを自らの身体として感じ、自由に動かすことはできるのでしょうか?こうした可能性を検証するひとつの方法として、ロボットアームや指型の機械を自らの身体に装着し、それを他の身体部位(例えば足など)の動きで動かす研究が近年行われています。しかし、こうした従来の試みは全て、既存の身体部位の機能や動きを人工身体のそれへと置き換えているにすぎません。自らが生得的に持つ身体の機能や動きはそのままで、それらとは独立して制御することが可能な新しい人工身体を人間は獲得することができるでしょうか?
こうした問いに答えるため、我々の研究グループは、まず他の身体部位の機能や動きと独立して制御可能であり、手のひらに簡易に装着可能な"sixth finger"を開発しました。次に、このsixth fingerの使用に短時間(1時間程度)慣れることにより、それが自分の身体の一部と感じられた(身体化した)ときに起こる感覚と行動の変容を捉えることに世界で初めて成功しました。これらの結果は、人間は自らの既存身体部位の機能と干渉することなく新しい付加的身体を取り込み、自らの身体を拡張できる可能性を実験的に証明したものです。
本研究の成果はScientific Reports誌に2022年2月14日(月)に掲載されます。
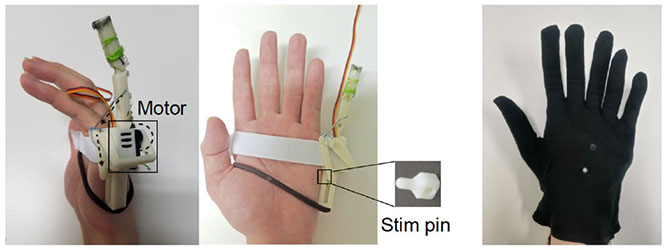
開発した「第6の指(sixth finger)」
今後の期待
既存の身体部位と独立して動かすことができる人工身体部位が工学的に実現可能であることがわかりました。応用的な観点からは、より力の出る駆動系を用いるなどの工夫を行うことにより、実世界で「使える」指になっていく可能性があります。例えば、高速なキータイピングが可能になったり、ピアノやギターの演奏を6本指で巧みに奏でたり、片手では持てない数のワイングラスを持てるようになったりなど、豊かで便利な生活の実現に貢献できるかもしれません。また、同様の技術を応用することにより、第三の腕や、四本の脚、なども実現できるかもしれません。さらには、しっぽや羽など、人間が持っていない器官を人間が身体化できるのかという問いにもアタックできる可能性を秘めています。
また基礎的な観点からは、こうした新しい身体部位を身体化したときに脳でどのような変化がおきているのかを調べることが重要です。身体は、体性感覚野[6]や運動野[7]と呼ばれる脳の部位で地図状に表現されています。新しい身体部位を身体化することによってこうした地図がどのように変わるのか、そしてまた脳はどこまで新しい身体を受け入れることができるのか、といった問いに挑戦することが可能になります。これらは、本研究で開発したような人工身体を使うことでしか解決できない問いであり、多くの重要な知見が生み出される可能性を秘めています。
こうした今後の期待と可能性を紹介した動画を以下で公開しておりますので、あわせてご覧ください(動画中で使われているsixth fingerは、本実験で用いたものを改良した新しいバージョンになりますので、図2で示しているものと異なります)。
プロジェクト紹介動画(動画:2分33秒)
(論文情報)
Kohei Umezawa, Yuta Suzuki, Gowrishankar Ganesh, Yoichi Miyawaki, "Bodily ownership of an independent supernumerary limb: an exploratory study," Scientific Reports (2022).
(外部資金情報)
本研究は、科研費挑戦的萌芽研究(15K12623)およびJST ERATO稲見自在化身体プロジェクト(JPMJER1701)の支援を受けて実施されました。
詳細はPDFでご確認ください。