
研究室紹介OPAL-RING
金森 研究室
3次元位置姿勢計測システム、光磁気式エンコーダ、計測・制御の知能化、
家電ロボット、楽器演奏ロボット
| 所属 | 大学院情報理工学研究科 知能機械工学専攻 |
|---|---|
| メンバー | 金森 哉吏 准教授 |
| 所属学会 | 精密工学会、日本ロボット学会、日本機械学会 |
| 研究室HP | http://www.rmc.mce.uec.ac.jp/ |
| 印刷用PDF |
掲載情報は2015年8月現在

- 金森 哉吏
Chisato KANAMORI
- キーワード
-
メカトロニクス、計測工学、計測制御システム、知能機械学、ロボットシステム、位置角度測定、エンコーダ、外界認識センサ、安全安心センサ
研究概要
精巧なロボットシステムの構築と進化を目指して計測と制御の高度一体化メカトロニクスシステム
メカトロニクスとは、メカニズム(機構)あるいはメカニクス(機械技術)とエレクトロニクス(電子技術)を合成して作った和製英語だと言われる。その本質は、単なる機械と電子回路の融合ではなく、機械がコンピュータにより情報化した点にあると言える。つまり、家電やロボットも含めて現在ほとんどの機械システムは、メカトロニクスシステムである。
当研究室では、ロボットメカトロニクス分野における実践的な課題と問題解決に取り組み、多数の研究プロジェクトを実施している。得意の計測・制御システムの設計・構築能力を活かし、ハードとソフト両方の側面から考えた精巧なロボットシステムの構築を目指している。
また、当研究室ではメカトロニクスのさらなる進化を目指し、高速(リアルタイム)、知能(インテリジェント)、相互理解補完(コミュニケーション&コンプリメント)、安心安全(セーフティ&セキュリティ)、簡素(シンプル&コンパクト)をキーポイントにして研究・開発を行っている。研究の柱は大きく分けて3つある。
オリジナルメカトロ要素
各種の物理現象、数学モデル、機能材料、加工技術に着目し、新規性のあるセンサ、アクチュエータなどの研究を行っている。さらにプロセッサ、コントローラ、オペレーティングシステム、アプリケーションプログラムなどの広い技術分野を含むメカトロコンポーネントの開発を行っている。これまでに、移動ロボット用ランドマークシステム、移動ロボット用超音波センサシステム、光磁気式エンコーダ盲導犬型ロボット用外界認識システム、投影パターンを用いた安全センサなどを開発した。
目標を明確にした専用システム
目的達成のために、前述のような広い技術視野を持ち、先進的なアイデアを具体化する大胆な挑戦を行い、オリジナルのメカトロ要素を含む画期的なシステムの開発を目指している。
これまでにレーザ光平面による3次元位置計測装置、減速機の角度伝達誤差測定装置、動的かみ合い誤差測定装置、高精度歯車測定機、天井面墨出しロボット、2台の移動ロボットによる協調作業システム、ビル内のごみ収集ロボットシステム、高速道路照明メンテナンスロボット、高密度実装ロボット、楽器演奏ロボットの研究・開発、アーチェリーロボットの開発をした。
アドバンテージ
「0→1、1→∞」—新しいものを自ら考え創り出して育てる研究
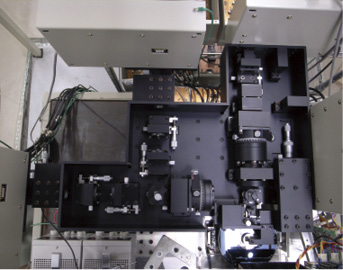
- 光磁気式エンコーダ実験装置
ものがあふれるこの時代に、真に必要なものは何か、取り組むべき課題、開発すべき機械とは何かについて、常に学生と共に議論している。
現在取り組んでいる研究課題には、当研究室オリジナルのものと共同研究によるものがある。
●3次元位置姿勢計測システムの開発
●投影パターンを用いた安全センサに関する研究
●3次元距離測定を用いた外界認識法に関する研究
●エンコーダの知能化に関する研究
●関節で知覚するロボットフィンガ
●回り階段を昇降可能な移動ロボット
●和太鼓演奏ロボットなど楽器演奏ロボットの開発
●アーチェリーロボットの開発
いずれもゼロから取り組んだものばかりである。これらの成果は、学会等で発表するとともに、特許出願し実用化を目指している。
IT技術と実験・実習を併用したメカトロ教育システムとプログラムの開発
当研究室の取り組みは、電気通信大学ロボメカ工房、2002年度機械学会教育賞受賞、03年度文部科学省「特色ある大学教育支援プログラム」に採択された「楽力によって拓く創造的ものつくり教育」、06年度文部科学省「魅力ある大学院教育イニシアティブ」に採択された「メカノインフォマテックス・カデット教育」、07年度文部科学省「IT活用国際化ものつくり教育事業」として結実し、発展を続けている。
現在、電気通信大学青山研究室と共に「クロスオーバーメカトロニクスプロジェクト」を実施し、アジア圏の大学の研究室間をネットワークでつないで、ハードとソフトの混合チームによるロボットの相互遠隔操縦コンテストなどに取り組んでいる。
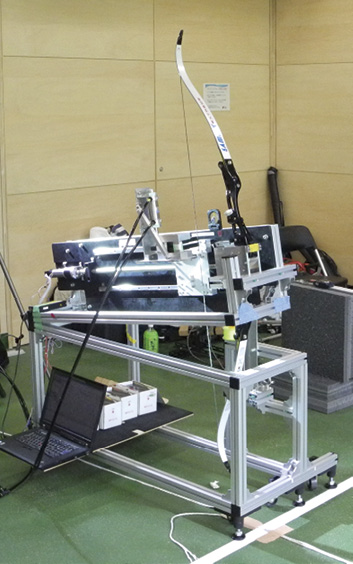
- アーチェリーロボット
今後の展開
幸せ機械工学科—世の中に幸せをもたらすものづくりを
本当に人間の生活の中で役立つ機械とは何か? そのためには何が必要か?人々の必要とする計測システムやロボットを作り、人々に貢献できる技術開発を行っていきたいと考えている。
ものづくりは情熱と技術の融合。常に人間の方向を向いた研究・開発・教育で社会に貢献していきたいと思う。
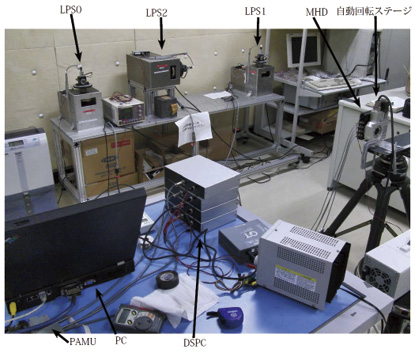
- 3次元位置姿勢計測実験装置

- クロスオーバーメカトロニクスプロジェクト
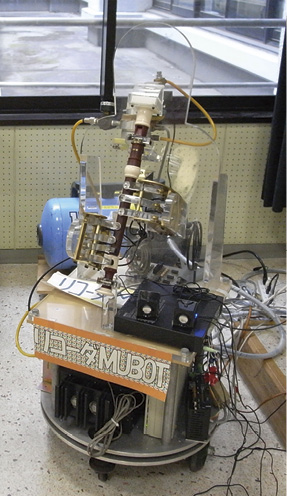
- モバイルリコーダMUBOT

- インテリジェントエンコーダを用いた和太鼓演奏ロボット
【特許情報】インテリジェントエンコーダを用いた和太鼓演奏ロボット
「移動環境認識装置及び方法」
(特開2008︲224380)
「物体検出装置とそれを適用したゲート装置」
(特許番号4859879号)
「移動環境認識装置及び方法」
(特許番号5499355号)
「移動環境認識装置及び方法」
(特許番号5742052号)