
研究室紹介OPAL-RING
杉 研究室
セル生産に対応した人間中心の生産システム、
生産現場での人間作業者の支援、
自律分散システム
| 所属 | 大学院情報理工学研究科 知能機械工学専攻 |
|---|---|
| メンバー | 杉 正夫 准教授 |
| 所属学会 | IEEE、日本ロボット学会、計測自動制御学会、精密工学会 |
| 研究室HP | http://www.hi.mce.uec.ac.jp/sugi-lab/ |
| 印刷用PDF |
掲載情報は2015年8月現在

- 杉 正夫
Masao SUGI
- キーワード
-
セル生産、屋台生産、生産システム、人間作業者、ロボット、動く箱、自走式、板取り、疲労度、疲労の定量化、筋電位、自律分散システム、自律分散型交通信号制御、非線形結合震動子、微分方程式モデル、手の動き、顔の向き、視線、履歴、条件確率、現場の声、FA
研究概要
人間中心の生産システム、人間作業者の支援の研究
工場などの生産の現場はここ数十年で大きな変化を迎えている。例えば、30〜40年前の生産現場は、自動化を目指して大きな生産ラインを組んでいたが、最近になって製品のライフサイクルの短期間化や多品種少量生産型にシフトし、ロボットの流れ作業から変更に対して柔軟に対応できる人間が組み立てを行うセル生産(屋台生産)方式に変わった。
この方法では人間のスキルがかなり必要で、これからの生産システムには、人間が得意な分野で人間が作業を行い、得意でない部分に機械を入れて手伝いをさせる「人間中心の生産システム」が重要となる。
当研究室では、これから主流になる「人間中心の生産システム」に関する研究、生産現場での人間作業者を支援する研究などを進めている。
動く箱を開発、板取りを研究
- 動く箱
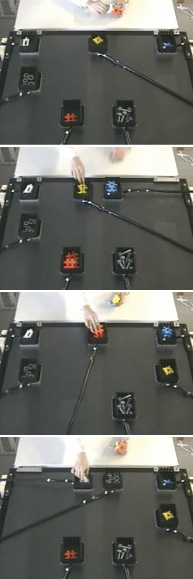
例えば、作業台の上に棚があり、そこから正しいものを取ってくるという作業は、人間が行うと時間がかかるし取り間違いが起こる可能性もある。そこで当研究室では、「動く箱」を開発した。具体的には、人間が「次」という合図を出すと次の箱が正面の取りやすい場所にやってくるので、取り間違いは無くなり、効率も良くなる。
この動く箱は、製造業に限らずオフィスや自宅などでも使えるのではないかと考えている。ただ、通常の人間が机で行う作業は、手順が決まらないものが多い。例えば、手紙を書く場合には、便箋、封筒、切手、筆記用具、糊などが必要だが、便箋と筆記用具のどちらを先に出せばよいのかは決まっていない。自由度の高い作業に対応するためには、何が欲しいかを明確にするための入力インターフェイスが必要になる。そこで、より直感的な処理を実現するために、指を差したり、手を伸ばした箱のものを持ってくるようなインターフェイスを採用した。
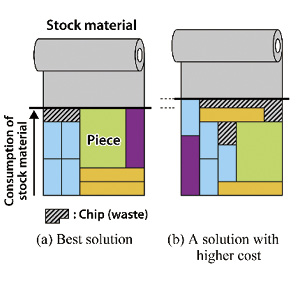
また、これを進化させたコードレスの「自走式」部品箱や、製造業における実用的な最適化問題として、大きい鉄板から小さいものを切り出す際の「板取り」についても研究している。
作業者の疲労度測定方法の研究
- 板取り
次に、生産現場の作業者の支援として、体を壊しにくい作業環境を研究している。製造業や販売業などでは、同じ姿勢が長く続くと作業関連運動器筋骨格系障害(WRMSD)と呼ばれるギックリ腰や五十肩を起こしたり、体を壊しやすいので、作業中の疲労度の測定方法を研究中だ。今までこの測定には採血をするなど面倒な手続きが必要だった。
そこで、電通大の横井研究室と共同研究し、作業中に皮膚表面の微弱な電流を測る表面筋電位という手法を使って疲労度を測定している。
他にも、可動机や可動椅子を作って、絶えず体を動かしながら作業することで、固着に対処する装置の研究も行っている。
自律分散システムの研究
これとは別に、蟻などが周りの限られた情報を見ながら全体で意味のある動きをするといった自律分散型システムを用い、自律分散型交通信号制御を研究している。これを実現するために、非線形結合振動子と呼ばれる微分方程式モデルを使った。ここで振動子同士の相互作用を決めておくと、交通量の多い方に流れるようになる。これにより、交差点の1個1個の信号が、自分の周りの交通量や信号の動きを見て、交通量の多い方向に系統だって切り替わるようになり、車の走るタイミングに合わせて青になっていく。
アドバンテージ
生産現場の立場に立って最適な解を提供できる
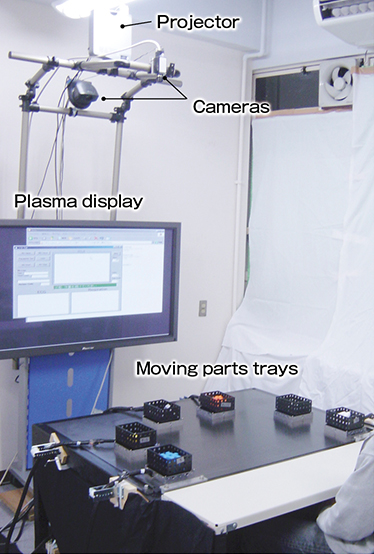
当研究室では常に作業者である人間の立場に立った研究を行っている。動く箱(「研究概要」参照)の場合、応答が遅いと人間はイライラしてしまうことが分かった。また、人間は、何かに腕を伸ばす際には必ずその方向に顔を向けるという特性があることも分かった。そこで、人間の要求を早く認識して、箱を動かさなくてはならないので、手の動きと顔の向きと視線を感知するためのカメラをステレオ配置し、早く対応できるようにしている。
また、過去の履歴から物同士仲が良いものとそうでないものを判別する仕組みを加えた。例えば、便箋と筆記用具は仲が良いというふうに、Aが呼ばれた後はBが呼ばれる、といった条件確率を蓄積していく。これを使うことで、直前にきたものから次に何がくるかを想像できる。視線、手、履歴の3つの条件確率を組み合わせることで、総合的な尤度(ゆうど)を出すことが可能となり、作業の曖昧さを推定するモデルが作れた。
板取りに現場の声を反映
板取りの場合も、生産現場の声を反映した。当研究室では、さまざまな問題設定と最適の結果が得られる解法を作っているので、かなり大規模なものでも精度の高い解を作ることができた。
板取りなどの研究はオペレーションズ・リサーチ(OR)の分野で多く行われているが、実は研究設定が現場のニーズと異なることが多い。例えば、研究では、どう詰めてもいいので隙間が小さくなるようにつめ込むことが多い。しかし、実際の現場では、できるだけ同じ形のものをたくさん切り出すことが重要になり、切断作業の際に途中で刃を止めずに切り出すギロチンカットができることが要求されている。既存の何でも詰め込む方式では、これら現場のニーズには対応できない。
疲労の定量化
疲労の定量化は、他に例の無い研究だ。筋肉についてはよく知られているが、時々刻々に変化する疲労度を侵襲性の低い測定手法で解析することは簡単ではない。しかも、筋電位から算出されたデータには、作業をしている筋肉の力と疲労度のデータが混ざって表示される。
そこで、特定の周波数帯だけを取り出すと、力の成分のみを測定・分析することができた。これを使って、最大に出せる緊張力の低下幅が疲労だと考えて、軽作業における疲労の定量化に成功した。
今後の展開
理想の生産ライン、部屋ロボットを作りたい
製造現場での理想の生産ラインを作ることを、当研究室は目的としている。さらに、生産現場に限らず、家庭での利用も視野に入れている。サービスロボットは2007年頃から研究されるようになった。当研究室では、人型のヒューマノイドではなく、家の中の壁や天井や机などにいろいろなものが組み込まれていて、部屋がロボットというものを作りたい。
また、疲労の定量化に関しては、現在は一番データが取りやすい末梢の部分で疲労度を測っているが、将来的には疲労が一番蓄積しやすい体幹部のデータを測りたいと考えている。また、今は筋肉の動きのないものが中心だが、動きに対応した測定を考えて、実作業での疲労度を定量化していきたいと考えている。