
研究室紹介OPAL-RING
舩戸 研究室
運動制御機構の研究
――ヒトや動物が姿勢を保つメカニズムを解明する
| 所属 | 大学院情報理工学研究科 知能機械工学専攻 |
|---|---|
| メンバー | 舩戸 徹郎 助教 |
| 所属学会 | 計測自動制御学会、ロボット学会、米電気電子学会(IEEE)、姿勢と歩行に関する国際研究会(ISPGR) |
| 研究室HP | http://www.ljung.ee.uec.ac.jp/ |
| 印刷用PDF |
掲載情報は2015年8月現在

- 舩戸 徹郎
Tetsuro FUNATO
- キーワード
-
歩行、姿勢制御、運動制御、バイオメカニクス、運動計測、力学シミュレーション
近年、ロボットの開発が活発に行われ、自律的に二足歩行できる人型ロボットはもはや珍しくなくなりました。しかしながら、ヒトと同じメカニズムで歩行するというレベルにはまだ達していません。最先端のロボットでも、ヒトの脊髄の機能を模倣するレベルにとどまっており、脳の仕組みまで取り入れた歩行ロボットは恐らくまだ実現していないでしょう。
ロボットに小脳
ロボットの開発を出発点として研究をスタートした舩戸徹郎助教は、ヒトの運動を制御する役目を果たす「小脳」の機能をロボットに導入することを目指しています。ロボットの制御性をさらに高めるためには、「小脳の仕組みを考慮した、ヒトの運動制御機構をしっかりと理解する必要がある」と考えているからです。
舩戸助教は現在、ヒトやラットの運動計測を中心に行っており、生物の運動やその力学構造を追究するバイオメカニクスの理論研究にその活動領域を移しています。特に直立時、および歩行時の力学構造を明らかにし、数学的に解析する研究に取り組んでいます。
ヒトは脳の働きによってバランスを保ち、真っ直ぐに立つことができます。それでも1時間くらい立ち続けていると、次第に身体に大きな揺れが生じるようになります。これは状況に応じて動きを変化させ、姿勢の安定化を図っているのであり、そこに小脳が関わっていると考えられます。舩戸助教は、こうした動きの変化を細かく計測することで、「ヒトは姿勢を安定に保つために、どのような制御機構を用いているのか」を明らかにしようと考えています。
直立制御モデル
実験では、ヒトの筋肉や関節に数十個のセンサーを取り付け、その動きをモーションキャプチャシステムで計測しました。ヒトを直立させた状態で床を動かし、揺れが生じて収まるまでの動きをとらえます。得られた運動のデータを力学的に解析することで、筋肉や骨格の動きを数式で表した「直立制御モデル」を導くことができました。
さらに、このモデルをコンピュータ上でシミュレーションした結果、直立時の「固定状態」から、姿勢が崩れるにつれて、揺れながらも安定性を保つ「周期運動状態」へと状態が分岐することを見出しました。その際に、「ある程度の外乱(ノイズ)があったほうが、姿勢を変える運動制御機構がスムーズに働くことが初めて分かった」(舩戸助教)そうです。
小脳疾患を解明する
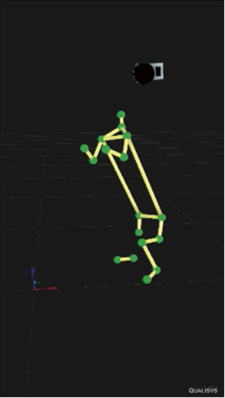
- ラットの直立実験のモーションキャプチャ計測画像
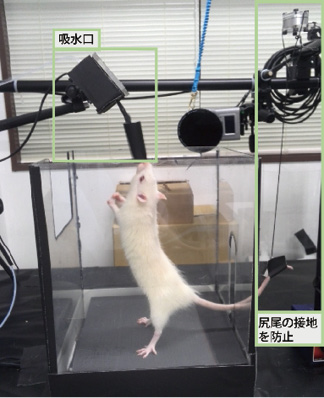
- ラットの直立実験
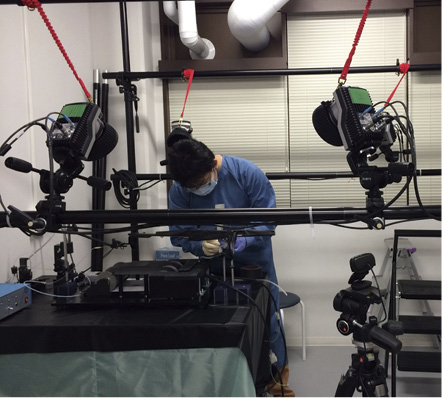
- ラットの実験環境
一方で、こうした制御機構が働かない時はどうでしょうか。遺伝性疾患である脊髄小脳変性症など小脳に疾患を持つ患者は、多くの場合、筋肉は正常に活動していてもフラフラしてうまく立つことができません。この運動機能の障害のメカニズムを明らかにするために、舩戸助教は2足で直立できるよう訓練したラットに薬物処理で小脳疾患を起こし、前述のヒトと同様の実験を試みました。
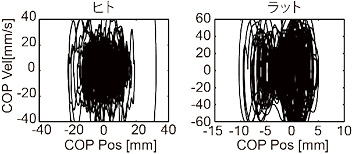
- ラットとヒトの小脳疾患状態における動きの軌跡
その結果、既に報告されている、ヒトの脊髄小脳変性症の患者と同じような動きのデータがラットでも得られたのです。小脳疾患がある場合に、よろめきつつも姿勢を保つよう動いた軌跡が、ヒトとラットでほぼ一致したのです。今後さらに、疾患が重度になるにつれて姿勢にどう影響を及ぼすか、また疾患の部位と運動がどのように関係するか、といった視点が明らかになることによって、「小脳疾患の解明につながるかもしれない」と舩戸助教は期待しています。
ヒトからロボットへ
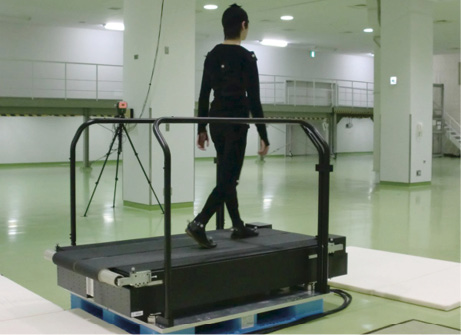
- ヒトの歩行実験
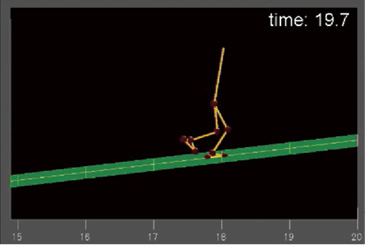
- ヒトの歩行シミュレーション
直立するために必要な生物の小脳の機構が明らかになれば、安定的に二足歩行できるロボットの開発に役立つでしょう。「歩行時でも、姿勢を安定に保つためには、直立時の制御機構がベースになる」と舩戸助教は考えています。どんな外圧が加わっても、しっかりと踏ん張って、自ら姿勢を正す安定的なロボットが将来開発されるかもしれません。
そのほか、舩戸助教は歩行時の研究も並行して進めています。ランニングマシンを使って、左右の足が進む向きをわざと変えた実験では、ヒトもラットも1分半ほどでその状況に慣れ、違和感なく歩けることを確かめました。これも恐らく小脳の学習系が関わっているのでしょう。さらに、関節と筋肉とを関連づけた研究では、個々の神経が、個々の筋肉を動かすのではなく、複数の筋肉を同時に働かせていることを示しました。こうした研究はロボットの開発だけでなく、リハビリなど医療分野への応用も開きます。まずは、「ヒトとは何か」を解明する――、舩戸助教はその先に、病気の治療や、ロボットの開発などを見すえているのです。