
研究室紹介OPAL-RING
東郷 研究室
ヒトの身体制御メカニズムを解明し、ロボット開発に応用する
| 所属 | 大学院情報理工学研究科 機械知能システム学専攻 |
|---|---|
| メンバー | 東郷 俊太 助教 |
| 所属学会 | 日本ロボット学会、日本神経回路学会 |
| 研究室HP | http://www.hi.mce.uec.ac.jp/togo/ |
| 印刷用PDF |
掲載情報は2017年3月現在

- 東郷 俊太 Shunta TOGO
- キーワード
-
協調運動、シナジー、運動計測、運動解析、冗長性問題、最適制御、ヒト機械協調システム、冗長ロボット、計算論的神経科学、心理物理学
ロボットをヒトのように巧みに動かすには、ヒトの身体制御のメカニズムを知る必要があります。東郷俊太助教は、脳の理解を通じてヒトの身体の制御機構を明らかにし、これを応用してヒトと協調するロボットを開発することを目指しています。知能機械学の領域において、「ロボット工学」と「計算論的神経科学」を組み合わせて研究しているのが特徴です。
脳とコンピュータを比較する
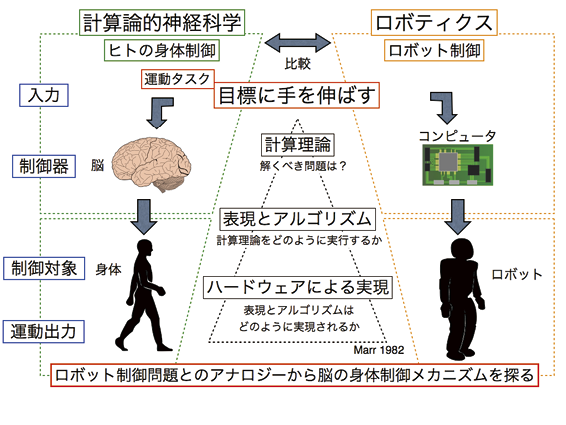
計算論的神経科学とは、脳を情報処理の機械に見立て、その機能を計算論に基づいて理解しようとする脳研究の領域です。「脳とコンピュータを対比させることで、ヒトの身体のようにロボットを制御させたい」と東郷助教は考えています。そのため理工系分野はもちろん、心理学などの文科系や医学系の専門家のほか、病院などとも組んで幅広い観点から研究しています。
筋電肩義手の制御性を向上
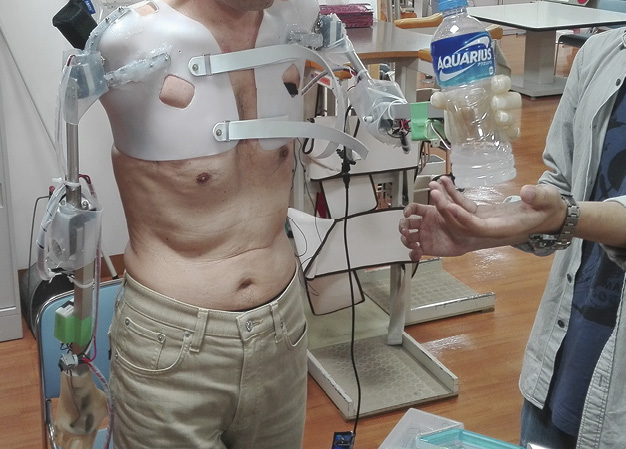
- 患者に装着した筋電肩義手システム
ロボット分野で主に取り組んでいるのが、「筋電肩義手システム」の開発とその評価です。筋電義手とは、筋肉が発する微弱な電気信号(筋電)を利用して制御するロボット義手で、事故や災害、疾病などで手を失った人が装着する道具です。その中でも、肘から下の手を欠損した患者が装着する「前腕義手(ロボットハンド)」はすでに製品化されていますが、肩から下をすべて失った患者向けの「肩義手(ロボットアーム)」は、動作の自由度が高いことから、制御が難しく、いまだ研究レベルにとどまっています。
そこで東郷助教は、肩義手の制御に適した筋電の計測位置を調べる実験を行い、肩、胸、脇、背中の4カ所の筋電を取れば、肩周りの筋群の動作時の筋電パターンが取得できることを示しました。今後、この箇所に自作の電極を貼り付けた上で、肩義手の試作機を患者に装着してもらってその性能を検証する予定です。将来は、「電極よりも取り付けが容易な『筋電計測スーツ』の開発も含めてシステムを最適化していく」そうです。
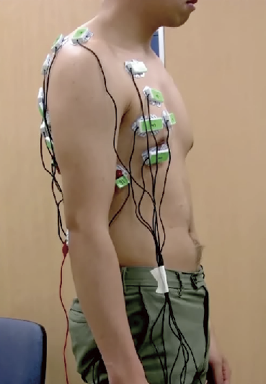
- 筋電の計測位置を調べる実験の様子
脳と運動、疾患との関係を探る
一方、神経科学の分野では、日常的な動作である「多指を使った運動」の問題を扱っています。複数の指でモノをつかむような場合、例えば、コップを持つ瞬間には、親指と、そのほかの4本の指にかかる力の合計が釣り合っていると考えられます。この際、4本の指にかかる力の組み合わせは無限に存在しますが、その時に脳はどのような指令を送り、このバランスをどうコントロールしているのでしょうか。
東郷助教はコミュニケーション力や想像力、社会性の問題に加えて、発達性の協調運動障害を伴うことが多い「自閉症スペクトラム障害(ASD)」の患者に対して、多指間の協調運動の実験を行いました。その結果、ASD患者と健常者では、多指運動のパターンに異なる傾向がみられました。この違いを利用すれば、「ASDの簡易な診断指標として使えるかもしれない」と東郷助教は期待しています。
筋シナジー仮説の検証も
そのほか、ロボットと神経科学を融合した三つ目のテーマとして、「筋シナジー(シナジー:共動作用)」の仮説の検証にも取り組んでいます。筋シナジーとは、生物が身体をどのように制御しているかという問題に対して、全身にある筋が一つ一つ独立に制御されているのではなく、複数の筋が束ねられたユニットごとに階層的に制御されているとする考え方です。
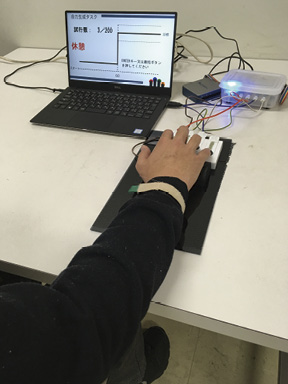
- 多指間協調運動の評価実験

- 「筋シナジー」仮説を検証するための測定機器
このように、ヒトの身体制御の仕組みを理解した上でロボット開発に応用すれば、将来、ヒトと同じようなメカニズムで動くロボットが実現するかもしれません。ロボットと神経科学、これらを両輪として手がける研究者は珍しく、東郷助教は「基礎研究から応用研究への橋渡しをしたい」と考えています。今後は、企業などと共同で、実用化に向けた装置開発にも取り組みたいそうです。
【取材・文=藤木信穂】