
OPAL-RING
Tetsuro FUNATO Laboratory
Control and intellectualization of multiple mobile robots, control of mechatronics systems, wavelet transforms, system identification, biological systems
| Faculty/Department | Department of Mechanical Engineering and Intelligent Systems Graduate School of Informatics and Engineering |
|---|---|
| Members | Tetsuro Funato, Assistant professor |
| Affiliations | Society of Instrument and Control Engineers, Institute of Systems, Control and Information Engineers, Institute of Electronics, Information and Communication Engineers, Institute of Electrical Engineers of Japan, the Robotics Society of Japan, Institute of Electrical and Electronics Engineers (IEEE) |
| Website | http://www.ljung.ee.uec.ac.jp/ |
As of August, 2015
- Tetsuro FUNATO
- Keyword
-
Intelligent robot, multi-agent (robot) system, visual feedback, robot manipulator, inverted pendulum system, wavelet transform, system identification, motion attitude control
Summary of Research
Four Fields of Research: Robots, Control, Signal Processing, Biological Systems
Our laboratory staff pursues research in four major fields: robots, control, signal processing, and biological systems.
The Robot Group
Our main focus of study is robots capable of operating and responding in diverse and complex environments and incorporating lessons from the experiences in these environments. To be capable of such environmental adaptation, the robots themselves must be able to recognize and assess their situation and to choose the optimal action based on the circumstances. The robots must also be able to coordinate their actions with other robots and with humans. Another important feature would be to provide visual feedback concerning situations that may change from one moment to the next, which would allow the robot to correct its actions accordingly.
To study these themes, the robot group builds and operates actual robots, part of efforts to identify and find solutions to various problems.
The Control Group
This group pursues studies to develop a general-purpose control algorithm that can be applied to a wide range of systems, such as inverted pendulum control systems and robot manipulators, with the ultimate goal of creating an automated mechatronic system.
The group is also seeking to establish a new and unified control theory to realize the various actions required by different applications, such as path planning and obstacle evasion in vehicular robots. Thus, these investigations focus on both theory and experiments using real machines. The group also works with the robot group to study control theory applications for multi-robot systems.
The Signal Processing Group
The research undertaken by this group focuses on wavelet transforms, an area that has drawn significant attention from associated fields in recent years. Wavelet transforms are a method for analyzing both signal time and frequency.
A special focus at our laboratory is the construction of a control system as an application of complex wavelet packets (system identification) for potential application to diverse industrial processes, from the obvious problem of signal separation (e.g., noise reduction in cell phone services) to issues in the electrical and petroleum industries.
The Biological Systems Group
By examining the neural control mechanisms associated with motion in humans and animals, this group seeks to understand the mechanisms underlying the deterioration of motor functions associated with nerve damage.
To do this, researchers measure motion while healthy subjects, impaired subjects, and animals move about or stand. The characteristics of the motion identified in the data are examined alongside the motor and neural control models from the perspective of functionality. The study focuses on understanding what information humans and animals use to implement locomotion and what functions are impaired in the event of diseases or disorders.
Advantages
Construction of a Numerical Model for System Control, with Applications to Various Fields
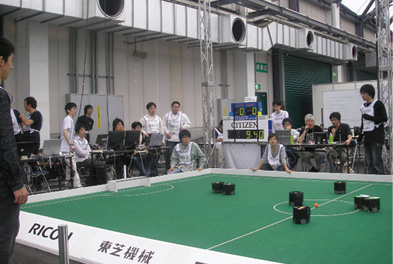
- A RoboCup match
The four groups at our laboratory-the Robot, Control, Signal Processing, and Biological System Groups-allow us to take a balanced approach to the study of system identification, an area that involves the extraction of numerical models for system control from I/O data sequences, as well as studies of system control with real machines. We also keep in mind the potential applications of our findings outside the academic world.
The Robot Group and the Control Group are working to establish a solid theoretical groundwork required to achieve precise robot movements. The Signal Group and Biological Systems Group are undertaking studies using unique analysis methods, such as wavelet transforms, along with bioinstrumentation, statistical analysis, and mechanical analysis, keeping in mind the potential applications of the results to solve problems encountered in actual systems.
Future Prospects
In the Pursuit of More Advanced Practical Applications-Applying and Implementing New Theories Through Joint Efforts with Industry

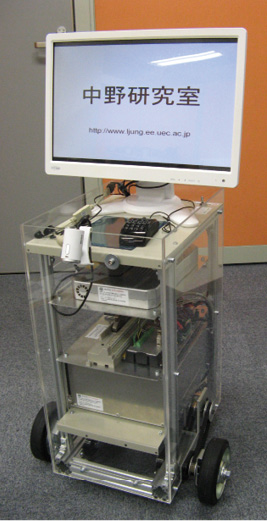
- Intelligent mobile robot
In the future, we hope to focus our efforts on developing practical control systems for robots, automobiles, and other industrial processes that for now lie beyond our horizon.
The Robot Group is bolstering their research to strengthen their standing in the Small Size League of the RoboCup Soccer (an international robot soccer championship). The Group is trying to develop new soccer robots capable of passing the ball, performing sophisticated mobile obstacle avoidance maneuvers, and engaging in coordinated play involving two or more robots, all difficult to achieve with the current system.
Tackling a more practical theme, the Control Group is seeking to establish a control theory that will allow robots and vehicles to avoid obstacles and move along optimal paths, ultimately leading to practical algorithms. Actual implementation is the ultimate goal.
The Signal Processing Group is proceeding with research to expand the range of applications for wavelet transforms, which allow systems to detect changes in their surroundings in real-time and thereby allow switching to the appropriate mode. We believe these functions will prove invaluable across a wide range of fields, including studies of safe automated driving systems for automobiles, as well as the safe operation and maintenance of large-scale industrial plants with associated risks, such as nuclear power plants. Studies are currently underway to model the denitration process at power plants; to develop optimized algorithms to investigate buried objects using ground penetrating radar; and to develop AED signal processing algorithms.
In partnership with medical institutions, the Biological System Group is currently studying changes in neural control systems caused by diseases and disorders based on motion analysis of patients suffering from cerebellar diseases. At the same time, the group is analyzing the movements of animals with cerebellar impairments to better understand the mechanism of nerve damage from mechanical, neurological, and clinical perspectives.
One of our goals is to engage in studies in close partnership with individuals at work on-site in various areas of medicine and industry. We look forward to hearing from any businesses interested in our research.
- AcroBox
- 2-link manipulator

- Soccer robot
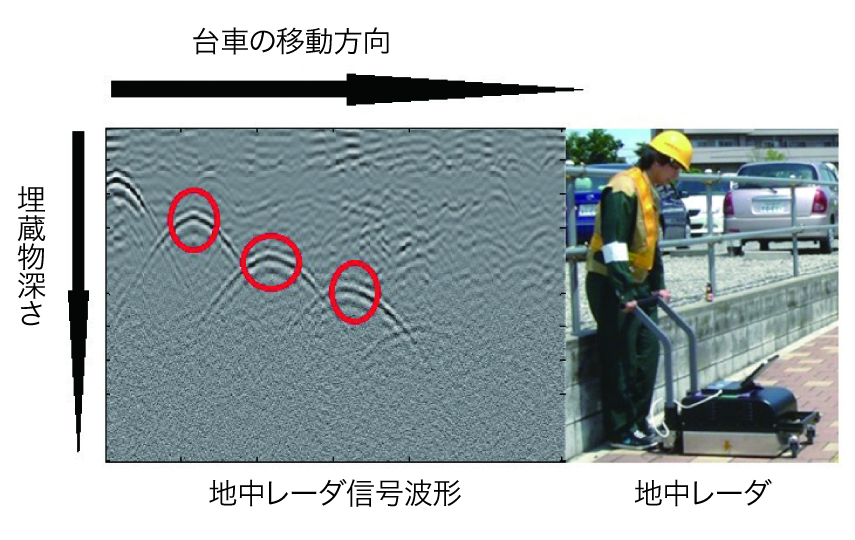
- Clarifying a ground penetrating radar image with wavelet transforms