
研究室紹介OPAL-RING
明 研究室
システム的なアプローチで、
より高度で有用なロボットとメカトロシステムを研究・開発する
| 所属 | 大学院情報理工学研究科 知能機械工学専攻 |
|---|---|
| メンバー | 明 愛国 教授 |
| 所属学会 | ロボット学会、日本機械学会、IEEE、精密工学会、計測自動制御学会 |
| 研究室HP | http://www.rm.mce.uec.ac.jp/ |
| 印刷用PDF |
掲載情報は2015年8月現在

- 明 愛国
Aiguo MING
- キーワード
-
ハイパーダイナミックマニピュレーション、複数台ロボットの協調制御、羽ばたきロボット、水中ロボット、移動マニピュレータ、移動体搭載小型トラッキングシステム、直接駆動式超高精度歯車測定器
研究概要
人間のような自然な動作や協調作業ができるロボットを作る
当研究室では、制御対象として優れた機構と、機構に最適な制御系を基に、特に非線形特性やダイナミクス特性に着目して、ロボットやメカトロ機器の機構系・制御系・センサ系などを総合的に研究し、実験による検証を行っている。
ゴルフスイングロボット
「人間に学ぶスマートなハイパーダイナミックマニピュレーション」の研究テーマの一環として作られたものである。人間は自身の身体を極めてうまく使っている。この人間の身体の使い方を研究し、シミュレートすることで、よりスマートな機構で高度な運動能力を持つマニピュレータの製作が可能となる。
このような新しい動的設計法・機構・運動制御法の開発を目標に、ゴルフスイングの動作を一例として取り上げて、ロボットに行わせている。具体的には、人のスイング動作のメカニズムと運動制御を解析し、新しいコンパクトな構造で人間のように自然なスイングのできるロボットを開発している。
今、これらの成果をヒューマノイド(人型ロボット)へ応用し、ヒューマノイドの運動能力の大幅な向上を目指している。
複数台で協調作業を行えるロボット
重いもの、大きなものを運ぶ作業に役立つロボットの開発を目指している。そのためには、自由に移動できる移動ロボットと、操作性のよいマニピュレータを組み合わせたものが必要なので、これを2台組み合わせたときの機構や協調制御のためのアルゴリズムを研究している。また、その応用としてホームサービスの実現を目指して、センサフュージョンを用いた移動マニピュレータシステムを開発している。
高度メカトロ機器の研究開発
現在、移動体の上に載せる小型トラッキングシステムの研究開発を行っている。そのために、トラッキングシステムの機構系・センサ系・制御系を統合して解析できるシミュレーションシステムを開発し、それを用いている。
その他の研究・開発
●高速・高精度の動きを従来よりうまく制御できる粗微動高速・高精度のシステムをロボットに実装する研究
●圧電ファイバを使って、「はばたきロボット」(名前のようにはばたく動きを再現するロボット)や水中ロボットといった新しいインテリジェントロボットなどのメカトロ機器開発
アドバンテージ
実用化を常に念頭に置き実際のものづくりを重視した研究
明は、1984年の来日以来、山梨大学、東京大学、電通大で、一貫してロボットやメカトロニクス分野で研究を行ってきた。この分野での豊富な技術的・研究的蓄積を有していることが、当研究室のアドバテージだと考えている。
また、専門がものづくりでもあるので、研究成果を実証実験で検証し、実装や実機製作も自前で行うことができる。現存しないロボットであっても自分である程度は作ってしまえる。このように机上の研究に止まらず、常に実装・実用化を考えた研究をしているという自負がある。
さらに、年に5、6回は研究成果を必ず国際的な場所で発表することにしている。国際学会のプログラム委員長なども歴任し、中国をはじめ広い国際的なネットワークを活かして、グローバルな研究開発を進めている。
今後の展開
非線形特性の研究を深めて小さな動力源で動くロボットを開発したい
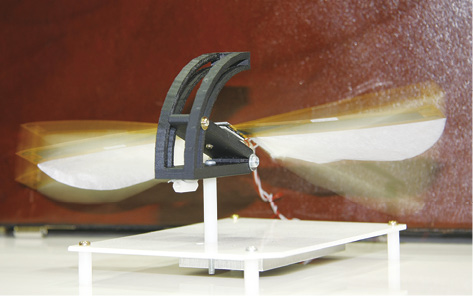
- 羽ばたきロボット
ゴルフスイングロボットの研究では、現在、このロボットは女子プロ並みの飛距離を実現しているが、これらの成果をヒューマノイドや多くの機械システムに応用したい。現在多くの機械システムは簡単さを重視して線形的な発想で動いており、ダイナミクス特性もあまり活用していない。
非線形的な機構やダイナミクス特性が活用できれば、よりコンパクトな機構でより労力が少ない自然な動作に近づくので、機械システムの進化に繋がる。非線形特性やダイナミクス特性の活用研究を重ねることで、より自然に様々な運動のできるヒューマノイドや、より自然にはばたく「はばたきロボット」や、より自由な動きのできる「水中ロボット」が、小さな動力源とスマートな姿で出現するようになるだろう。
直接駆動式超高精度歯車測定器を共同研究開発中
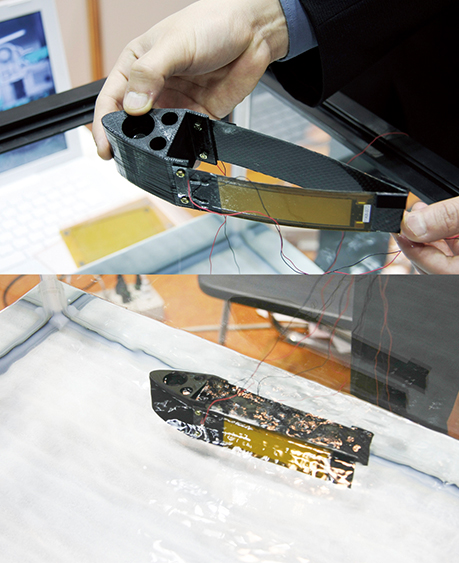
- 水中ロボット
また、メカトロ機器の1つとして、直接駆動式超高精度歯車測定器を企業との共同研究で開発中である。これは、最新の機構を用いて多軸の直接駆動アクチュエータを高度に同時制御することで歯車精度の計測を行う機械で、世界最高精度の達成を目指している。
ロボットとメカトロニクスの高度な技術を応用することで、近い将来、人間の生活により役立つ様々なタイプのロボットを作り出すことが可能になるだろう。その日のために、どんなロボットに実装し、どんな場面で使えるのか、実際の社会でどのように役立つかを常に念頭に置きながら、基礎研究と実証実験を積み上げていきたいと考えている。
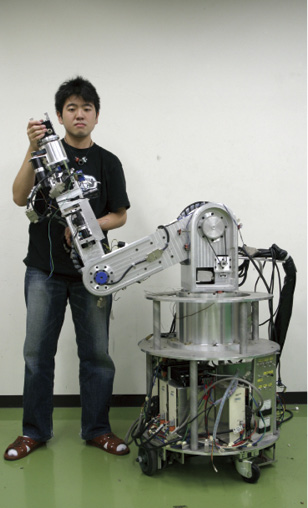
- 移動マニピュレータ
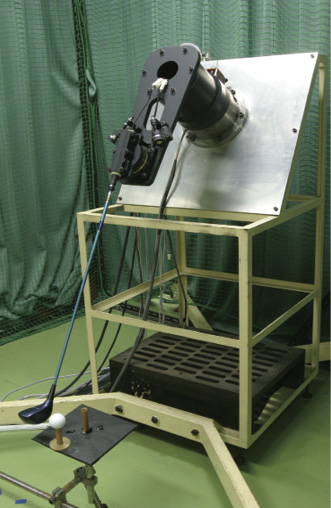
- ゴルフスイングロボット

- 水中ロボット