
研究室紹介OPAL-RING
内田 研究室
大空に羽ばたくバルーン魚ロボットと、触覚ディスプレイの研究
| 所属 | 大学院情報理工学研究科 機械知能システム学専攻 |
|---|---|
| メンバー | 内田 雅文 准教授 |
| 所属学会 | 電気学会、米電気電子学会(IEEE) |
| 研究室HP | http://ulab.ee.uec.ac.jp/2010/ |
| 印刷用PDF |
掲載情報は2017年3月現在

- 内田 雅文 Masafumi UCHIDA
- キーワード
-
バルーン魚ロボット、触覚ディスプレイ、生体計測技術、仮現運動、1/fゆらぎ、P300波
陸に住む我々人類にとって、「海」は未知なる世界であり、なかでも大海を悠々と泳ぐ魚には、多くの人が魅せられることでしょう。そんな優雅な大魚の躍動を“大空に”表現してみたい―。内田雅文准教授は、こうした思いで、本物の魚のように尾びれを動かして進むバルーン(飛行船)魚ロボットを作製しています。
近年は、物資の輸送などに利用するドローン(飛行ロボット)が注目されていますが、ドローンは通常、プロペラを回転させて高速で飛行するため、必ずしも人に対して安全だとは言えません。これに対して、空中に浮かぶバルーンロボットは、柔らかく動作もゆったりとしているため、人が触れても安全です。
内田准教授は、現在は人が制御しているバルーン魚ロボットを自動で制御させることで、「ドローンの一種として活用したい」と考えています。ただ、ドローンと言っても、移動の効率さなどを追求した現行のものとは差別化し、人に与える癒やしや安全性を持ち味にした、屋内の空間演出のツールなどとして使える新概念のドローンを目指しています。

- 作製したバルーン魚ロボットが遊泳する様子
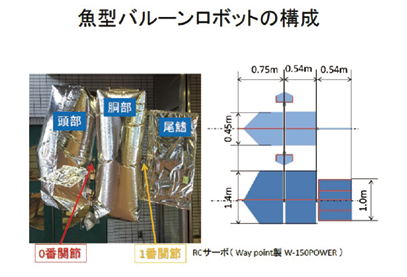
バルーン魚ロボットは、例えば、動きを制御するために三つの関節を設け、その部分にそれぞれモーターを置いて全体を1個のマイコンでコントロールします。制御プログラムの信号は、無線通信によってロボット内部のマイコンへと送ります。バルーンの中はヘリウムで満たされています。
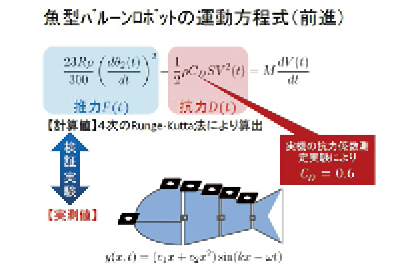
では、どのように推進力を得ているのでしょうか。魚の「くねり運動」を再現するために、一般的な魚ロボットの制御に使われている方程式「トラベリング・ウエーブ」を使います。これに基づいて関節の角度を決めれば、くねり運動によって、前方に推進する力がロボットに働くのです。
しかしながら、この方程式は、魚の頭部は固定されているという前提で定式化されています。つまり、水中の動きにおいては成立しても、尾びれのくねり運動によって頭の位置が変動してしまう空中の動きに対しては、方程式をそのまま適用することができません。そこで内田准教授は、空中での魚ロボットの動特性を実験により明らかにし、空中遊泳する魚ロボットのモデル化に必要なデータを最近得ました。
今後、厳密な手法で動きをモデル化できれば、人が介在せずに、バルーン魚ロボットを自律的に動かせるようになります。近いうちにまず、無人で1時間、特定のエリアを遊泳するロボットの開発を目指すそうです。その先に「複数の魚ロボットを連携させ、魚群のような動きを表現できれば、また違った応用が開けるだろう」と内田准教授は考えています。
これまでに、秒速約1メートルの速さで進む、体長最大5メートルのジンベエザメやマグロ、アジ、マンボウなどを作りました。基本骨格はそのままで、衣を着せ替えるだけで、さらに多様な種類の魚ロボットも作れるでしょう。今後は、魚にとどまらず、「『バルーンロボット』という新たな領域を作り、モノを運ぶ用途なども開拓したい」そうです。
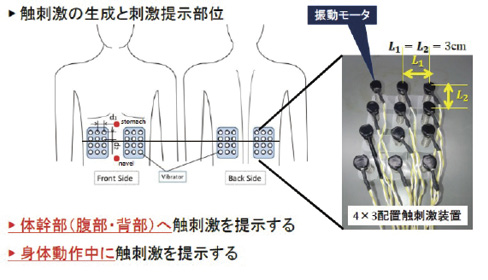
- 振動を与える触覚ディスプレイを腹と背中に装着
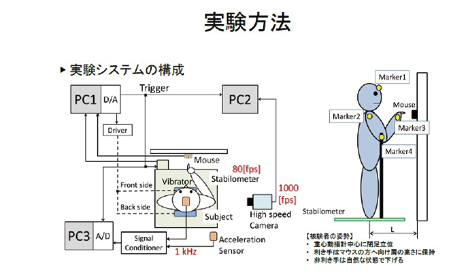
これらとは全く異なるテーマとして、内田准教授は生体計測にも取り組んでおり、その中でも特に、「触覚」を使ってさまざまな情報を伝える研究を行っています。ここで目指すのは、「言葉では表現しにくい、体の具体的な動きを触覚によって伝える」ことです。 振動によって体に刺激を与える、実験の一例を挙げてみましょう。腹と背中にそれぞれ、独立に動く約50個の振動モーターを並べた触覚ディスプレイを装着し、振動の大きさが体の動きにどう影響するのかを調べました。解析の結果、複数の刺激を与えたときの体の反応を定量化できました。
この結果を利用すれば、刺激の種類やタイミングを調整することで、例えば、腹に与えた振動が、体幹を抜けて背中へと伝わったような感覚を引き起こさせることができます。つまり、振動につられる形で、体を特定の方向に誘導できる可能性があるのです。
応用として、「ナビゲーションやリハビリテーションシステムのほか、警告装置の開発などが想定できる」と内田准教授は考えています。触覚による“錯覚”の仕組みを取り入れれば、将来、人間の動作を安全に導くようなことが可能になるかもしれません。
【取材・文=藤木信穂】