
研究室紹介OPAL-RING
田中(基) 研究室
階段や小道も難なく進む「ヘビ型ロボット」の開発
| 所属 | 大学院情報理工学研究科 機械知能システム学専攻 |
|---|---|
| メンバー | 田中 基康 教授 |
| 所属学会 | 米電気電子学会(IEEE)、計測自動制御学会、日本ロボット学会 |
| 研究室HP | home 田中 基康 研究室 |
| 印刷用PDF |
掲載情報は2023年4月現在

- 田中 基康 Motoyasu TANAKA
- キーワード
-
ヘビ型ロボット、多連結ロボット、冗長性、レスキューロボット、点検ロボット、不整地踏破
1メートルを超える段差やはしごを登ったり、はたまた20センチメートル幅程度の狭い小道をすり抜けたりなど、人間が踏み込めない場所にも入り込める「ヘビ型ロボット」は、工場などの点検や、災害現場のがれき上を移動する災害救助(レスキュー)用途などとして期待されています。
ヘビ型ロボットを研究する田中基康教授は、ヘビのように細長いこのロボットを「いかに賢く動かすか」をテーマとし、制御アルゴリズムの開発や、実際にロボットを作って動かす実用研究を手がけています。
生物を超える
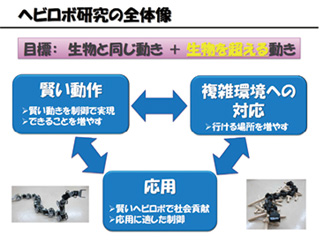
ヘビ型ロボットは、今やロボット研究における一大分野に発展していますが、そもそもなぜ「ヘビ型」なのでしょうか。生き物のヘビは手も足もない細長いシンプルな体でありながら、平地はもちろん、障害物がある場所や狭い道でもスルリと進みます。微小な突起に体を引っかけて壁を登ったり、泳いだり、さらには樹上から滑空するものもいます。
田中教授は「単純な形状ながら、多様な機能を発揮できる」とヘビ型ロボットの魅力を語ります。ヘビ型ロボットの開発は当初、ヘビの動作をまねる研究から始まったそうですが、複数の関節(モータ)を巧みに動かすことで、「生き物の動きを模倣するだけでなく、それを超える動作を実現しつつある」といいます。
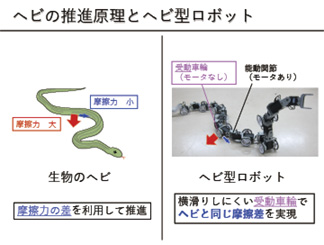
ヘビ型ロボットはモータのついていない受動車輪と、モータのついた能動関節による摩擦力の差を利用して推進します。横滑りしにくい受動車輪によってヘビと同等の摩擦差を実現し、“体”をうねうねと屈曲させながら移動するのです。長さは自在に変えられ、軽いため持ち運びも簡単です。ほかにも、車輪にモータをつけたものや車輪が全くないものなど、多様なタイプのヘビ型ロボットがあります。
頭と尾を同時に制御
平地だと難なくできる動きも、不整地ではとたんに難しくなります。田中教授はこれまで、障害物を回避したり、転倒から起き上がったり、また台車を押したりジャンプしたりなど、さまざまな動きが可能なヘビ型ロボットを開発してきました。最近では、頭でドアを開けて尾から侵入するといった動作も確認しています。頭と尾を同時に制御できるのは、世界でも田中教授のグループだけです。
このほか、配管内を通り抜けたり、管に巻き付きながらバルブを開け閉めしたりといった複雑な動作も可能になりました。ロボットの進行を妨げる引っかかり(スタック)を検知し、それを解消する制御にも成功しています。頭にカメラ、胴体に118個のセンサーを取り付けてスタックを検知し、自動でスタックを解いて動作を復帰させることができます。
国際ロボット競技会に出場
2020年に日本で開かれたロボットの国際競技会「ワールド・ロボット・サミット」(WRS)に、田中教授はバルブを開閉するプラント点検用のヘビ型レスキューロボットとともに出場しました。通常、開閉動作には強い力が必要ですが、ヘビ型ロボットは軽いため、そのままではその反力に耐えきれずにロボット自身が動いてしまいます。そこで、ロボットハンドを頭に取り付けて開閉時にかかる反力をこのハンドで打ち消すことで、スムーズなバルブの開閉動作を実現しています。
もう1台、車輪に磁石をつけて磁力で壁面を登るロボットでも競技に出場し、鉄製のタンク壁面にある対象物を点検するというミッションに挑みました。タンクは曲面のため、車輪を接触させながら登ることは簡単ではありません。ハードウェア(機構)とソフトウェア(制御)の両面を工夫することで、単純な操縦でも曲面にピタリと張り付きながら動かすことに成功しました。

- バルブを開閉するロボットと(上)壁面を登るロボット
あと一息のところで決勝への切符に手が届きませんでしたが、「ミッションを通じて、実用を想定した環境で検証できたことは貴重な経験だった」と田中教授は感じています。得られた知見は、その後のロボットの改良に生かしています。
福島第一原発の廃炉作業にも
ここ数年で応用研究もぐっと進みました。2018年の西日本豪雨災害では、全壊家屋の探索で田中研究室のヘビ型ロボットが活躍しました。消防施設などでも実証実験をしています。事故や災害発生時の被害の拡大を抑える点検作業をロボットが代替できれば、「災害時のレスキューロボットとしてだけでなく、平常時から使える『災害予防ロボット』として役立てられる可能性がある」と田中教授は考えているのです。
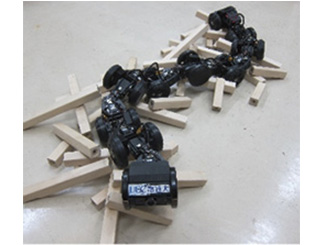
- 災害時の探索や、家屋・プラント点検用のロボット①
- 災害時の探索や、家屋・プラント点検用のロボット②
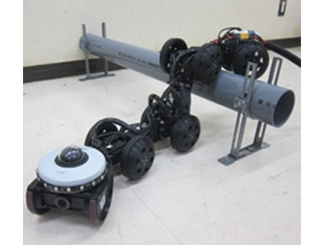
最近も、マンションなどの建設現場の地下ピット内を自動で点検するヘビ型ロボットを大末建設と共同で開発しました。障害物を避けながら自律的に移動し、地下ピットの各区画をつなぐ高さ最大1メートルの「人通口(じんつうこう)」を乗り越え、所定の位置で撮影をこなします。田中教授は、段差を乗り越えるのが得意なヘビ型ロボットの「絶好の活躍の場」であるといいます。

- 地下ピット自律点検用のロボット
地下ピットは天井が低く、二酸化炭素濃度の高い危険領域に指定されており、さらに真っ暗で無線も届かないような場所です。そこを無人で点検すれば、人の作業を大幅に削減できるだけでなく、作業中の事故などのリスクも減らせます。2023年度から同社の現場点検に導入し、2025年度ごろから建機リース会社を経由しての製品提供を目指しています。
また、東日本大震災による福島第一原子力発電所の事故後の廃炉作業支援にも、遠隔操作できる田中研究室のヘビ型ロボットが使われる見込みです。狭い場所にも入り込め、さらに高い段差を超えられるヘビ型ロボットの活躍が期待されています。現在でも前後に積んだカメラで前方と後方を確認できますが、今後さらに線量計や無線中継器などを搭載していく予定です。
そのほか、お掃除ロボットやマッサージロボットなども研究しています。ヘビ型ロボットは、人が入れない場所にスムーズに「移動できる」ことが最大の特徴ですが、そこにロボットハンドなどの機能を追加すれば、目的地に移動した上で「作業させる」ことが可能になります。用途に応じてサイズや制御方法を変えながら、自在にカスタマイズできる「作業ロボットの“プラットフォーム”にヘビ型ロボットはなり得る」と田中教授は考えています。
【取材・文=藤木信穂】