
研究室紹介OPAL-RING
中村(友) 研究室
「ドラえもん」のような知能ロボットは可能か
| 所属 | 大学院情報理工学研究科 知能機械工学専攻 |
|---|---|
| メンバー | 中村 友昭 助教 |
| 所属学会 | ロボット学会、人工知能学会 |
| 研究室HP | http://soybean.ee.uec.ac.jp/kaneko/
https://sites.google.com/site/nakatomo1018/ |
| 印刷用PDF |
掲載情報は2015年8月現在
- 中村 友昭
Tomoaki NAKAMURA
- キーワード
-
知能ロボット、概念獲得、言語獲得、マルチモーダルLDA、ロボカップ@ホーム
ロボットは昨今、ますます高性能化が進んでいます。日進月歩で賢くなるロボットは現在、どんなことができて、どんなことができないのでしょうか。人間の知能にどれほど近づいているのでしょうか。「知能ロボット」の開発で最先端を走る中村友昭助教の研究を見れば、ロボット研究の最前線を知ることができるでしょう。
ロボットの性能を競う大会に、有名な国際ロボット競技大会「ロボカップ」があります。これは日本の研究者が提唱して始まったコンテストで、ロボットと人工知能を融合して人型ロボットのサッカーチームを作り、「2050年までに人間の世界チャンピオンチームに勝つ」という目標を掲げています。

- ロボカップ世界大会の様子
ロボカップには大きく分けて四つの競技種目があり、その一つに、日常生活の場面で人間とロボットの共同作業を競う「ロボカップ@ホーム」種目があります。中村助教が長井隆行教授らと共同で開発した知能ロボット「DiGORO(だいごろう)」は、2011年にこの種目で世界一に輝きました。日本大会では優勝チームの常連で、毎年コンスタントに好成績を収めています。
最近のロボカップ@ホームで、ロボットに与えられた課題を見てみましょう。一つは「人の追跡」です。特定の人を認識し、その人が遠く離れたり、別の人が割り込んできたりしても、その人を追跡できるかどうかを競います。
二つ目は「人探し」です。ある人がロボットに「私は電通太郎です」と自己紹介し、ロボットが顔と名前を記憶した上で、別の部屋の多くの人の中からその人を見つけ出し、「あなたが電通太郎さんですね」と言えれば成功です。

- 物体の認識と把持
三つ目は買い物です。実際の店舗で、どこにどんな商品が置いてあるかをロボットに教え、命令された商品を間違えずに持って来られるかをテストします。
最後の課題がウエーター業務です。レストランなどでロボットが人の顔と名前を記憶し、その人が注文したものを正確に持って来られるかどうかを競わせます。
DiGOROは買い物の課題で商品を正しく選んだにもかかわらず、つかむのに失敗したミスもありました。しかし、以上の4課題の総合で高得点をマークしたのです。人の顔は「画像認識」でとらえ、名前は「音声認識」によって処理します。「この二つの技術を融合していることが、他のロボットにはないDiGOROの特徴だ」と中村助教はアピールします。
DiGOROの開発に当たっては、大量のモノをロボットに見せ、その名前を教えることで、モノの名称と画像を結びつけてロボットに覚えさせました。これは「物体の学習と認識」の研究です。90%程度の高い正確さで、命令されたモノをロボットが持って来られるようになりました。
もう一つの重要な研究が、「言語の理解」です。DiGOROには、名詞と行動が結びつく1500例を超えるパターンを学習させました。これにより、例えば「ビールを取ってください」「ビールが欲しい」「ビール持ってきて」というように、人が普段使う多様な言葉で命令しても、ほぼ100%の確率でそれを認識できるようになったのです。

- 視覚・聴覚・触覚情報の取得
DiGOROは、もう既にかなり実用的なロボットとして完成しています。ただ、人間がロボットにあらかじめ知識を与える、こうした“トップダウン”のアプローチには限界もあります。学習させたモノ以外のことは、ロボットは認識できないからです。
そこで、中村助教はロボットが自律的に知識を獲得することを目指した“ボトムアップ”のアプローチの研究にも取り組んでいます。独自に開発したのが、ロボットに視覚、聴覚、触覚の三つの感覚を与えて物体を分類させる「マルチモーダルカテゴリゼーション」と呼ぶ手法です。
これは、赤ちゃんのように言語を獲得させようとする方法です。人間の赤ちゃんは、モノを見て、触って、口に入れたり、投げたりしてモノの感覚を学習しています。その時に、親や他人から「それはぬいぐるみだよ」「これはボールだよ」などと教えられることで、モノの概念を徐々に獲得していくのです。
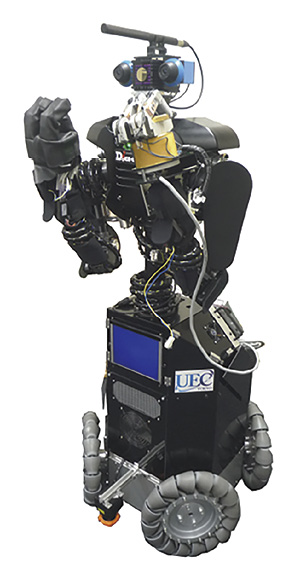
- 自律移動ロボットDiGORO
中村助教は、その過程をロボットに学習させることにしました。ロボットに多方向からモノを与え、ロボットはそれを見て、触って、感触を確かめます。モノを振って鳴った音も確認します。ロボットが触ったその時に、人間が「これはお茶だよ」などと教えます。
200個程度のモノに対してこのように学習させた結果、ロボットも人間と同様に、モノを「概念」として捉えて分類できることが分かりました。これまでは特定の商品のモノだけ「お茶」だと判断していたロボットが、「ペットボトルに入っていて、振ると音が鳴る、緑色の液体は『お茶である』」というように、自律的に判断できるようになったのです。
「まだ簡単な実験ではあるが、人間が言語を獲得する過程がある程度、再現できているのではないか」と中村助教は考えています。人間を真似た高度な知能ロボットを作ることで、翻って人間の言語獲得の仕組みが解明できるとしたら、それは非常に興味深いテーマになるでしょう。最終的にはトップダウンとボトムアップの手法を融合し、中村助教は「“ドラえもんのような”万能な知能ロボットを家庭に普及させたい」という夢を描いています。
【取材・文=藤木信穂】