
研究室紹介OPAL-RING
姜 研究室
ヒトの身体機能を代替、補助、拡張するためのロボットの開発
| 所属 | 大学院情報理工学研究科 機械知能システム学専攻 脳・医工学研究センター |
|---|---|
| メンバー | 姜 銀来 准教授 |
| 所属学会 | 米電気電子学会(IEEE)、日本ロボット学会、日本知能ファジィ情報学会、日本生体医工学会 |
| メールアドレス | jiang@hi.mce.uec.ac.jp |
| 印刷用PDF |
掲載情報は2019年4月現在

- 姜 銀来 Yinlai JIANG
- キーワード
-
ヒューマン・インタフェース、ヒューマン・ロボット・インタラクション、ロボットアーム、歩行支援、ワイヤ干渉駆動、筋電センサ、意図推定、動作解析、生体信号計測
高齢化が進む社会において、自らの意志で最期まで人生を楽しむには健康の維持が欠かせません。仮に障がいを負った場合でも、ロボットなどのテクノロジーを導入すれば生活の質を驚くほど向上させることができるでしょう。
日本では高齢化によって障がい者が増加傾向にあります。自立で生活できない場合は家族に多大な負担をかけるため、例えば、介護施設の入所者がリハビリテーションを終えて自宅に戻りたいと思っても、実際には帰宅しないケースが少なくありません。
姜銀来准教授はこうした背景から、ヒトの手足の運動機能を計測してロボットで失った機能を代替したり、弱まった機能をサポートしたり、また、本来ヒトが持たない機能を拡張したりする研究開発に取り組んでいます。具体的なテーマは、機械的に人を支援するロボットアームや歩行支援機、また電気的に人を支援する機能的電気刺激の開発のほか、利用者が使いやすい筋電を用いたヒューマン・インタフェースの研究などです。
ワイヤ干渉駆動をモジュール化
姜准教授が開発するロボットアームの最大の特徴は、ワイヤを使った駆動方法です。弾性を持つワイヤを使うことでロボットアームを柔軟に動かし、衝突しても衝撃を緩和させることができます。また、歯車やベルトを使った従来の方法よりも軽いためシステムの軽量化が可能で、モータを数多く配置できることから、設計の自由度が高いといった利点もあります。
ワイヤ駆動はこのように柔軟性、軽量化、自由度の観点で有効である一方、従来はワイヤの特性によるたるみなどによって高精度に制御できなかったり、ワイヤが切れやすいために頻繁にメンテナンスしなければならなかったりするなどの課題がありました。
これに対して、姜准教授はワイヤ干渉駆動をモジュール化することで効率良く動かし、制御精度を高めるとともに、モジュールの交換だけで修理できるようにしてメンテナンス性を向上しました。
7自由度で動かす
例えば、肩に三つ、肘に二つ、手首に二つのモーターを取り付けて試作したロボットアームは、モジュール化したワイヤ駆動では世界で初めて、ヒトのように腕を7自由度で滑らかに制御することができるようになりました。本体の重さは2.2キログラム、持ち上げ可能な重さは1.5キログラムと、既存の軽量のロボットアームに比べて重量に対する出力比を2倍以上に高めています。
こうしたロボットアームは高性能なロボットの開発に役立つだけでなく、ヒトの上肢の運動機能を代替することができ、肩から下が離断された人の義肢などとして使えます。さらに「考えるだけで機械を操作する、いわゆるブレイン・マシン・インターフェース(BMI)と組み合わせれば、脳の信号によってより自在な制御が可能になる」と姜准教授は考えており、実際に国のBMI研究プロジェクトにも参画しました。
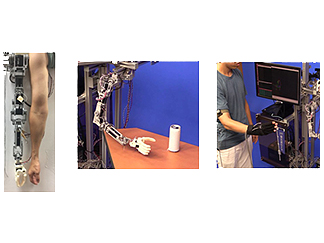
- 開発した7モーター7自由度のロボットアーム

- モジュール化したワイヤ干渉駆動機構
歩行支援機や義手の開発
一方、歩行訓練のためのリハビリなどで使う、下肢機能を代替する歩行支援機については、取り付け不要で測定精度の高い「近接覚センサ」を用いて、人が歩行機で歩いている時の位置を計測し、その位置の変化から歩行速度を算出できるシステムを開発しました。
従来のモーションキャプチャを使った方法のように、利用者にセンサやマーカーを付けることなく歩行速度が分かるため、使いやすく、歩きぶり(歩容)に合わせて歩行支援機の走行を制御できます。このシステムを搭載した歩行支援機によって、歩行訓練を効果的に補助できることを実験で確認しました。足と歩行支援機の距離を常時モニタリングして速度を制御すれば、つまずきや転倒も防止できます。

- 開発した歩行支援機

- 新しい筋電電極の開発
また、上肢機能を代替するものとして、筋電センサを使った簡易型義手の開発も手がけています。ロボットアームはヒトの腕の「動き」を再現するものであるのに対し、義手はその「機能」を再現するもので、自分の意図で動かせなければなりません。
筋電義手とは生体の筋電信号を計測し、装着者の意図を推定して機器を制御するものですが、姜准教授はその際に用いる新しい筋電電極を開発し、片手でも装着できる表面筋電図(sEMG)計測システムを考案しました。障がい者が1人で容易に使えるこの「マルチパターンsEMG識別法」は多自由度の義手とも相性が良く、電気通信大学横井・東郷研究室と共同で開発した筋電義手は厚生労働省の認可を受けています。
ヒトとロボットの融合へ
そのほか、上肢と下肢の両方に適用できるのが、筋肉の刺激によって動作を促す電気刺激による手法です。同手法は脳卒中の患者のリハビリなどに推奨されています。この機能的電気刺激の研究において、姜准教授は電気刺激によって最も筋収縮が起こりやすい部位「モータポイント」を追従することで、疲労の発生を抑えながら、効率的に筋肉を刺激する方法を考案しました。
このように、姜准教授は「単に機械を開発するだけでなく、機械を人の能力に合わせて制御できるようにしたい」と考えており、ロボットに対する情報とエネルギーの送受方法を開発することで、人とロボット間の相通や互助、融合を目指しています。
【取材・文=藤木信穂】