【ニュースリリース】自己センシングが可能な人工筋肉を開発
2021年10月05日
ポイント
- マッキベン型人工筋肉に柔らかいセンサを埋め込む手法を考案
- 外部センサなしでも安定して自己センシングができることを確認
- ロボットやヒューマンアシストデバイスなどの実用化を促進
概要
新竹純助教(機械知能システム学専攻)らの研究グループは、自己センシング(認識)※1が可能なマッキベン型人工筋肉※2を開発しました。空気の入出力によって長さ方向に収縮するマッキベン型人工筋肉は、単純な構造ながら機械的に安定で大出力を得られることから、次世代のロボットやヒューマンアシストデバイス※3の実用化に向けた有望な技術と言われています。
このような機械システムにマッキベン型人工筋肉を用いる際は、システムの状態を把握したり制御したりするために、長さ方向にどれだけ収縮しているかをセンサによって測る必要があります。しかし、従来用いられてきたレーザー変位計などの外部センサは、システムを複雑化させてしまうという欠点がありました。
今回、新竹助教らは、マッキベン型人工筋肉の構造そのものに柔らかいセンサを埋め込む手法を考案し、外部センサなしの自己センシングによって収縮を検出することに成功しました。センサは柔らかいポリマー製であり、人工筋肉に埋め込んでもその動作に影響しません。激しい動作を行っても、安定した自己センシングが可能なことを確認しました。
本成果により、マッキベン型人工筋肉の導入がより容易になり、ロボットやヒューマンアシストデバイスを含むさまざまな機械システムの実用化を促進することが期待されます。
※1 自己センシング:外部センサなしにデバイスそれ自身の状態を測定可能なこと
※2 マッキベン型人工筋肉:人工筋肉とは、生物の筋肉と同様に、入力に対して伸縮や曲げ変形を出力するアクチュエータや材料を指す。マッキベン型人工筋肉とは、空気圧の入力に対して筋肉のように縮む柔らかいアクチュエータのこと
※3 ヒューマンアシストデバイス:介護やリハビリテーションにおいて人の動作を補助するデバイス
背景
ソフトアクチュエータの一種であるマッキベン型人工筋肉は、1950年代から1960年代にかけて行われた義肢の研究のために開発されました。伸縮性のあるチューブの外側に伸び歪みしない編組繊維のスリーブを配置した構造で、スリーブはチューブの末端で結束されています。チューブに空気圧を与えると径方向に膨らみ、それと同時にスリーブを構成する繊維同士の交差角度が大きくなって長さ方向に縮む仕組みです。
マッキベン型人工筋肉の特徴として、電磁モータに比べて軽量な割に出力が大きいこと、また構造が柔らかいため軟接触が可能で安全性が高いことが挙げられます。これらの利点から、ロボットや補助器具、手術機器といったさまざまなデバイスに適用されています。
しかしながら、マッキベン型人工筋肉はアクチュエーションの際にチューブとスリーブの摩擦によってヒステリシス※4が発生するため、精密に制御するには追加のセンサが必要になります。これまでにも、レーザー変位計を用いたものなどさまざまなタイプのセンシング法が提案されていますが、こうした外部センサを取り付けた人工筋肉は、構造の特殊性から製作が困難であったり、特別な機器が必要だったりするデメリットがありました。
そこで本研究では、マッキベン型人工筋肉にエラストマーセンサを統合することを検討しました。エラストマーセンサは、柔らかいエラストマー膜の両面を2枚の柔軟な電極で挟んだ単純な構造をしており、製作や人工筋肉への統合が容易に行えます。センサはチューブ上に貼り付けられており、人工筋肉の収縮に応じて静電容量が変化することを利用して、長さ方向の変形を検出できます。今回、エラストマーセンサを内包したマッキベン型人工筋肉を製作し、測定を通じて、センサ特性の解析を行ないました。
※4 ヒステリシス:伸び縮みする変形において、同じ入力でも行きと帰りで変形の量が違うこと
手法
市販のフィルム状の誘電体と電極材料を用いてセンサを作製し、人工筋肉のチューブの外側にこれを貼り付けたセンサ付き人工筋肉を作製しました。誘電体と電極材料の破断伸びは300%以上であり、高い伸縮性があります。また、これらの材料の引張強さは0.7MPa程度であり、チューブの引張強さ(32MPa)よりも十分小さいため、アクチュエータの動作にはそれほど影響しないと考えられます。
人工筋肉の駆動源となる圧縮空気はエアーコンプレッサーから供給し、電磁弁によって圧力を調整しています。電磁弁は圧力センサからの情報を基に、マイクロコントローラが制御します。また、電磁弁に電力供給するためにDC電源を用いました。アクチュエータの一端は3Dプリンタで作成した部品で固定し、他端には荷重(110g)を与えて形状が直線に保たれるようにしました。センサの静電容量値はLCRメータによってサンプリング周波数120Hzで計測しました。
こうした実験環境において、製作した人工筋肉のセンシングとアクチュエーションの特性解析を行い、合計3つのサンプルを測定してその平均値を求めました。印加圧力は300kPaまでとし、25kPaずつ圧力変化させました。
成果
センサ応答の測定結果を見ると、圧力の上昇に応じて静電容量が大きく増加していることが分かります。この時、アクチュエータは長さ方向に収縮しており、その変形がセンサの応答に表れていることが分かります。0kPaから300kPaまで各センサ値の誤差は小さく、精度が高いことを示唆しています。変形量の標準偏差も全体を通して小さく、製作誤差も小さく抑えられていることが分かりました。また、作成した解析モデルとセンサの出力は一致しており、1000回以上の繰り返し動作に対する安定性も確認できました。以上の実験結果から、提案手法がマッキベン型人工筋肉のセンシングに有効であることが示されました。
今後の期待
エラストマーセンサを統合したマッキベン型人工筋肉を提案しました。センサ付き人工筋肉を製作し、その測定を通してセンシングとアクチュエーションの特性解析を行ないました。その結果、アクチュエータの長さ方向の変形がセンサによって検出できていることが分かり、提案手法の有効性を示すことができました。
これにより、マッキベン型人工筋肉の導入がより容易になり、ロボットやヒューマンアシストデバイスを含むさまざまな機械システムの実用化を促進することが期待されます。今後は、これらのロボットデバイスの研究開発を行う予定です。
論文情報
雑誌名:IEEE Robotics and Automation Letters
論文タイトル:Self-Sensing McKibben Artificial Muscles Embedded with Dielectric Elastomer Sensor
著者:Ryo Kanno,Shuya Watanabe,Keita Shimizu,and Jun Shintake,Member,IEEE
DOI番号:10.1109/LRA.2021.3093276
外部資金情報
科学研究費助成事業 19H05328
科学研究費助成事業 21H00324
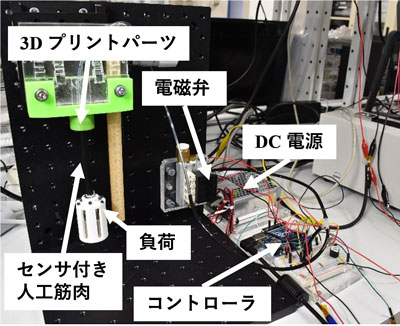
センサ付き人工筋肉の測定に用いた実験環境
詳細は下記PDFをご覧ください。