【ニュースリリース】センサレス制御が可能な人工筋肉の数理モデルを提案
2021年11月25日
ポイント
- *マッキベン型空気圧ゴム人工筋肉の拮抗構造をもつ柔軟駆動系の数理モデルを提案
- *柔軟な駆動装置がセンサレス制御可能であることを実証
- *センサの取り付けが不要になることから、構造上の制約やコストの軽減が可能に
- *従来不可能だったfMRIを用いた高磁場環境で利用できる
概要
電気通信大学大学院情報理工学研究科の小木曽公尚准教授らは、センサレス制御[1]が可能な空気圧で動作するマッキベン型空気圧ゴム人工筋肉(McKibben pneumatic artificial muscle:PAM)[2]の数理モデルを考案しました。関節パーツを介して2本のPAMを平行に配置した構造(拮抗構造)をもつ柔軟なアクチュエータ(駆動装置)向けのモデルで、角度センサやトルクセンサを用いずに、角度とトルクの制御ができることを確認しました。
柔軟なアクチュエータにセンサの取り付けが不要になれば、構造上の制約を軽減でき、コスト低減にもつながります。特に、これまでセンサがあるために使えなかった機能的核磁気共鳴画像法(fMRI)を用いた高磁場環境などでもアクチュエータを利用できるようになります。
PAMは軽量で柔軟、出力重量比が大きいなどの特徴をもつことから、リハビリテーションロボットや介護ロボットなど人と接する機会の多い機器のアクチュエータとして適しています。そこには回転動作が可能な拮抗構造が用いられています。人や環境に優しいこのようなアクチュエータの開発には、PAMを低圧域で正確に制御することが求められます。センサレス制御が可能な拮抗構造をもつPAMの精密な数理モデルが得られれば、より低コストかつ小型で軽量の新しい柔軟なアクチュエータの実現につながると期待されます。
成果は国際学術誌「IEEE/ASME Transactions on Mechatronics」に掲載されました。
今後の期待
センサレス角度、トルク制御において十分な目標値追従性能が達成できていることが分かり、拮抗構造をもつアクチュエータの高精度なセンサレス制御が実現できました。
今後、センサレス剛性制御系の構築を進めることで、軽量で低コスト、かつ人や環境との接触時に危害を加えない、安全でやさしいアクチュエータの開発が可能になると考えられます。
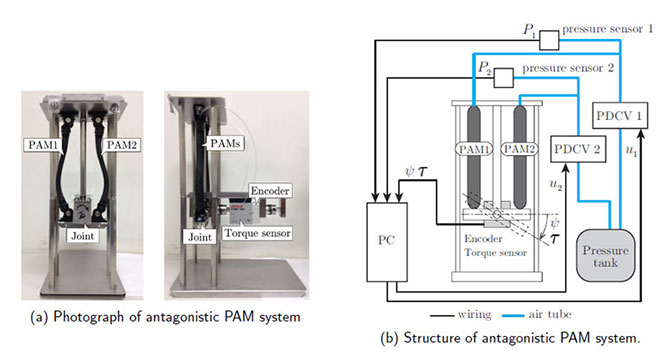
作製したPAMシステム
論文情報
- 雑誌名:「IEEE/ASME Transactions on Mechatronics」
- 論文タイトル:Detailed Dynamic Model of Antagonistic PAM System and its Experimental Validation: Sensor-less Angle and Torque Control with UKF
- 著者:Takaya Shin, Takumi Ibayashi, Kiminao Kogiso
- DOI番号:10.1109/TMECH.2021.3086218
外部資金情報
本研究は、科学研究費挑戦的研究(萌芽)JP25709014(2021-2022)および科学研究費基盤研究(C)JP18K04012(2018-2020)の助成を受けて行いました。
用語説明
- [1]センサレス制御:センサを取り付けずに、制御に必要な物理情報を推定して駆動する制御方法
- [2]マッキベン型空気圧ゴム人工筋肉:空気圧を印加することでヒトの筋肉のように収縮する軽量で柔軟なアクチュエータ。装着型パワーアシストロボットやリハビリテーションロボットに利用される
詳細は下記PDFをご覧ください。