【ニュースリリース】物性測定に基づいた虫の動きの高精度シミュレーション
2022年06月15日
ポイント
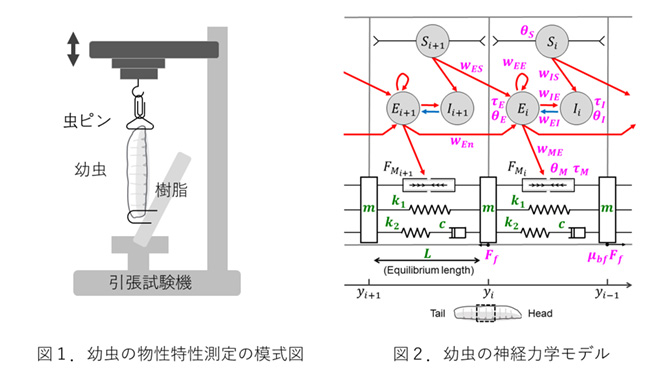
*ハエの幼虫の粘弾性および筋力を物性物理の手法を用いて測定
*得られた物性値に基づいて、虫の動きを定量的に再現する神経力学モデルを構築
*動物に着想を得るソフトロボット開発への貢献の期待
概要
高坂洋史准教授(共通教育部)、能瀬聡直教授、伊藤耕三教授(東京大学大学院新領域創成科学研究科)、眞弓皓一准教授ら(東京大学物性研究所)の研究グループは、物性測定に基づいたショウジョウバエ幼虫の動きの神経力学モデルを構築し、高精度で虫の動きをシミュレーションすることに成功しました。この成果は英国科学誌 BMC Biologyに掲載されました。
背景
やわらかい身体をもつ動物は、環境に適応してしなやかに動きます。この動きは、身体の各所に配置された筋肉と、それらの筋収縮力を調整する神経回路からの指令によって実現されます。従来、運動制御に関わる神経回路については詳しく調べられてきましたが、その出力先である動物の身体に関してやわらかさや筋収縮力といった物理特性についてはあまり明らかになっていませんでした。そのため、やわらかい動物がしなやかに動くしくみについて不明な点が多く残されています。
今後の期待
動物が複雑な環境のなかでどのように適応的でしなやかな動きを生み出すのか、というのは神経科学において重要なテーマです。今回構築した神経力学モデルは、動物の動きの背後にある物理機構について定量的な分析を可能にするものです。このモデルが、地球上に生息するやわらかい動物の多彩な動きの理解に貢献できると期待されます。
動物の動きは、長い進化の過程で育まれ、洗練されてきました。この動物の動きに着想を得て、適応的で効率のよいソフトロボットの開発が世界中で急速に展開されています。本研究の神経力学モデルは、定量的な予測が可能であるため、ソフトロボットのデザインや性能予測に寄与できると期待できます。
(論文情報)
著者名:Xiyang Sun, Yingtao Liu, Chang Liu, Koichi Mayumi, Kohzo Ito, Akinao Nose, Hiroshi Kohsaka
論文名:A neuromechanical model for Drosophila larval crawling based on physical measurements
雑誌名:BMC Biology
DOI:10.1186/s12915-022-01336-w
公表日:2022年6月15日
詳細はPDFでご確認ください。