【ニュースリリース】しなやかな幼虫の動きを再現するソフトロボットの開発に成功- ぜん動運動の物理の解明に貢献 -
2023年04月06日
ポイント
*虫のぜん動運動を模したソフトロボットを開発し、ハエの幼虫の運動特性を再現
*ソフトロボットを用いて幼虫の収縮力が運動速度に関係することを予測
*柔らかい動物が巧みに動くしくみの物理的理解に貢献できると期待
概要
高坂洋史准教授(共通教育部)、孫喜洋大学院生(東京大学大学院新領域創成科学研究科複雑理工学専攻 研究当時)、能瀬聡直教授(同大同専攻)の研究グループは、ショウジョウバエ幼虫の動きを再現するソフトロボットの開発に成功しました。この成果は国際科学誌PLOS ONEに2023年4月5日(水)付けで掲載されました。
手法
この研究では、動物の示す典型的な運動の一つであるぜん動運動に注目しました。モデル化する対象として、ぜん動運動を示し、かつ神経回路の研究が進んでいるショウジョウバエの幼虫を選びました。これまでにシリコーン樹脂を用いて幼虫を模したソフトロボットが開発されていますが、ぜん動運動によって移動することができませんでした。
そこで、実際の幼虫を模して二点の改良を加えました。まず、従来は体節を膨張させていましたが、本研究では真空ポンプを用いて実際の幼虫と同様に個々の体節を収縮させました。また、幼虫のお腹には靴のスパイクのような構造があって、その摩擦が前進運動に関わっていると考えられているので、ソフトロボットに前後非対称な摩擦が生じるようなしくみを取り入れました。
成果
開発したソフトロボットに対して、適切な強度とタイミングで体節内の圧力をコントロールしたところ、ぜん動運動のような動きを再現することができました。このロボットは、幼虫の動きの特徴のいくつかも再現することが明らかになりました。幼虫は、前進運動より後進運動の方が遅いことが知られていますが、開発したソフトロボットでも同様に、前進運動よりも後進運動が遅いことが観察されました。
さらに、このロボットを用いて、従来は解析が難しかった、収縮力の強さが運動に与える影響を調べました。真空ポンプとロボットとの間のバルブの開閉時間を制御することで、収縮力を変えて運動速度を調べたところ、収縮力が強いほど、運動速度が上がることが明らかになりました。以上の結果から、幼虫がぜん動によって巧みに動く物理機構について、ソフトロボットを使うことで詳しく解析できることが示唆されます。
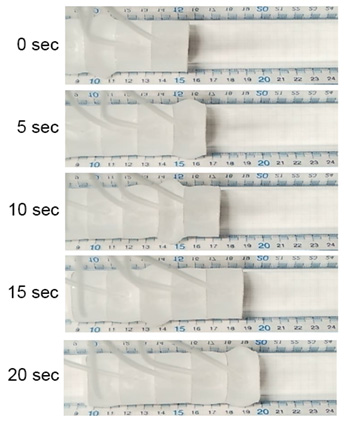
ソフトロボットのぜん動運動の様子
(論文情報)
著者名:Xiyang Sun, Akinao Nose, Hiroshi Kohsaka
論文名:A vacuum-actuated soft robot inspired by Drosophila larvae to study kinetics of crawling behaviour
雑誌名:PLOS ONE
DOI番号:![]() 10.1371/journal.pone.0283316
10.1371/journal.pone.0283316
公表日:2023年4月5日(水)
詳細はPDFでご確認ください。