
研究室紹介OPAL-RING
新竹 研究室
ソフトロボティクス ー 電気接着ロボ、泳ぐ魚ロボ、可食ロボの開発
| 所属 | 大学院情報理工学研究科 機械知能システム学専攻 |
|---|---|
| メンバー | 新竹 純 助教 |
| 所属学会 | 米電気電子学会(IEEE) |
| メールアドレス | shintake@uec.ac.jp |
| 印刷用PDF |
掲載情報は2019年9月現在

- 新竹 純 Jun SHINTAKE
- キーワード
-
ソフトロボティクス、ソフトアクチュエータ、ソフトセンサ、生物模倣ロボット、魚ロボット、可食ロボット、誘電エラストマーアクチュエータ
概要
未来のロボットのあり方を変える“柔らかい機械”、いわゆる「ソフトロボティクス」は、現在世界中で活発に研究されている分野です。人工筋肉と呼ばれる柔らかいアクチュエータなど、新しい材料や部品が開発されてきたことがその背景にあります。ロボットが柔らかくしなやかになれば、より安全になり、人と協働しやすくなることは間違いありません。新竹純助教は、スイス連邦工科大学ローザンヌ校での博士課程時代からソフトロボティクスの研究に取り組み、ソフトエレクトロニクスや材料工学の手法を取り入れて、柔らかい材料に基づくアクチュエータやセンサ、ロボットを開発してきました。これまでに電気接着ロボットや折り畳みロボット、硬さの変わるロボット、泳ぐロボットや食べられるロボットなど斬新なロボットを数多く開発しています。
さまざまな機能を持つロボット
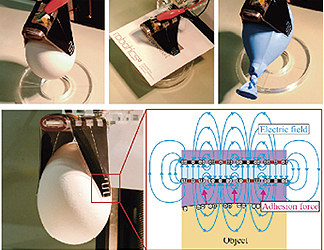
- 開発した電気接着グリッパーとその仕組み
電気接着ロボットは静電気力でモノをくっつけるロボットハンド(グリッパー)で、電場応答性高分子の一種である柔らかい「誘電エラストマーアクチュエータ」を使って開発しました。このソフトグリッパーは上下方向に加えて平面方向にも電位差を与えることで、モノを引きつけながら、同時に摩擦力によってつかむことができます。例えば、そのままではつかみにくい柔らかいモノや平らなモノなどの把持に適しており、試作機では卵などをつかむことができました。
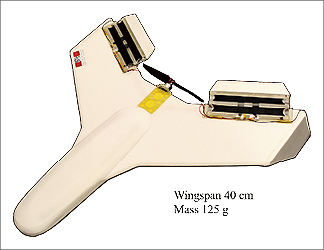
- 折り畳みロボットのイメージ
また、折り畳めるロボットは珍しくありませんが、新竹助教は誘電エラストマーを用いた柔らかい電極や独自の膜を使った折り畳みアクチュエータを開発し、これを翼の部分に2枚ずつ搭載したドローン(飛行ロボット)を作製しました。アクチュエータに高電圧をかけて上下に曲げ運動させ、これによって実際に飛行できることを確かめました。柔らかいアクチュエータは物体に衝突しても壊れにくく、機体を折り畳むことで輸送時などにコンパクトにできます。
さらに、同様のアクチュエータと、温度が変わると固体から液体に変化する金属(低融点合金)を使って、硬さが自在に変わる「変化剛性」を持つグリッパーも作りました。アクチュエータだけでは柔らかいのでモノは持てませんが、ワイヤに電気を流してその電位差によって温度を変えると、金属が硬くなって保持力が向上し、モノをつかむことができるようになります。
魚と同じように泳ぐ
一方、2枚の誘電エラストマーアクチュエータをうまく制御して、魚のように水中を泳ぐロボットも開発しました。ボディの素材に魚の体に近い柔らかさを持つシリコーンを選び、頭や胴体、尾ひれなどの形状も似せて作りました。流れの振動現象の周波数を表す値(ストローハル数)は魚類とほぼ一致しており、水中でも実際に魚と同じような滑らかな泳ぎができることを確認しています。

- 魚ロボットの構成と泳ぎの様子
新竹助教は「魚のように効率良く泳ぐロボットを開発するだけでなく、魚の集団行動を研究する生物学などにもプラットフォームとして応用できる」と考えています。生物模倣ロボットは今後も大きなテーマになっていくそうで、ソフトアクチュエータに限らず、サーボモーターなども用いて幅広く研究していく予定です。
そのほか、誘電エラストマーを使った柔らかいセンサなども開発しています。炭素ナノ粒子を使った2枚の電極による静電容量を利用した手法で、センサの形状や配置は自由にデザインできます。静電容量の変化によって最大5倍まで伸びる高い伸縮性を持つため、例えば、手に貼り付けるなどしてウェラブルセンサとして使えば、指の繊細な動きを的確に検出できます。
食品科学と融合
これに加えて画期的なのが、「食べられる(可食)」ロボットです。現存するロボットの機械特性に着目し、それと同程度の弾性率を持つ可食材料を探しました。その結果、ゼラチンがシリコーンと似た特性を持つことが分かり、ゼラチンを使った誘電エラストマーを3Dプリンタで作製し、電気ではなく空気圧によって動く可食ロボットを作りました。実際に、シリコーン製の空気式アクチュエータと同等の性能を示しています。
適用例として、例えば食品加工工場に可食ロボットを導入すれば、加工の工程で異物が混入するリスクを減らせるかも知れません。安価なため、すぐに交換できることも衛生面で利点があり、生体適合性も高く環境に優しいロボットです。新竹助教は「これから食品業界などと連携し、ロボット工学と食品科学を融合した『可食ロボティクス』の発展に寄与できればうれしい」と考えています。
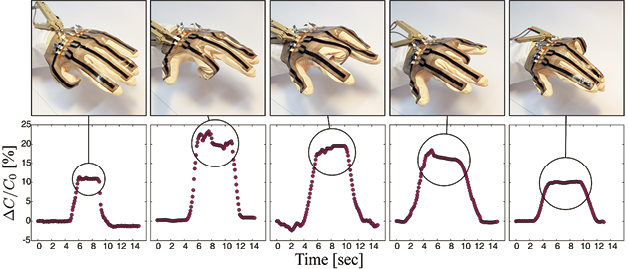
- ウェラブルセンサで指の動きを検出
食べられるドローンの開発も
これを応用し、スイス連邦工科大学ローザンヌ校と仏ローザンヌホテルスクールと共同で、災害時などに食糧を運ぶ「可食材料を使った輸送用ドローン」なども開発中です。ドローンの機体をビスケットのような可食材料で作ることで、全体重量の75%程度を食糧にできると新竹助教は見込んでいます。従来型のドローンに比べて輸送できる食糧の量は2倍以上になります。 新竹助教は今後、こうした誘電エラストマーなどの知的材料や、低融点合金や炭素ナノ粒子といった導電性材料、可食材料などの有機材料を組み合わせることで、さまざまな機能を持つ自律的なソフトロボットを開発し、ロボットの利用拡大に貢献したいと意気込んでいます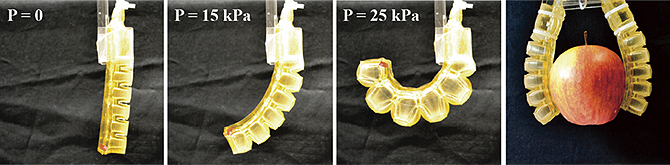
- リンゴをつかむ可食ロボット
【取材・文=藤木信穂】