
As of August, 2015
| Faculty/Department | Department of Human Media Systems Graduate School of Information Systems |

|
| Members | Takashi Suehiro, Professor Shunsuke Kudoh, Associate professor Tetsuo Tomizawa, Assistant professor |
|
| Affiliations | Institute of Electrical and Electronics Engineers (IEEE); Robotics Society of Japan; Japan Society of Mechanical Engineers; Society of Instrument and Control Engineers | |
| Website | http://www.taka.is.uec.ac.jp/ | |
Autonomous mobile robots, service robots, mechatronics, intelligent systems, observing and learning from human behavior, knack (skill acquired without explicit programmed instruction), skill, tying knots, manipulator, RT middleware, computer vision
Robotics represents an integration of various technologies and technological aspects, including hardware, software, control, virtual reality, and artificial intelligence. At our laboratory, Professor Suehiro, Associate Professor Kudoh, and Assistant Professor Tomizawa each draw on their individuals fields of expertise to undertake research and development to create useful intelligent systems (robots) capable of interacting with humans in their daily lives based on an integration of hardware and software.
Assistant Professor Tomizawa’s research focuses on studies of autonomous mobile robots, service robots, and mechatronics. One example is a robot capable of moving autonomously to its destination based on positioning information provided by GPS sensors aboard electric carts (for senior citizens) and of using sensors to avoid collisions with humans and obstacles.
In the “Tsukuba Challenge 2010” (a contest involving autonomous mobile robots) held in November 2010, the CARTIS TypeR, an electric cart developed by our laboratory, successfully completed an autonomous run of the 1.1 km course around the Tsukuba Expo Center, satisfying all conditions, including making temporary stops.
Other intelligent systems being studied include a more efficient and intelligent automatic door. This system uses sensors to register the flow of people in its surroundings, opening its doors only after identifying a person who intends to pass through them, not simply when it detects someone nearby. Additionally, when this system senses that only one person wants to enter, it opens the doors only to the extent needed to allow that individual to pass. The system opens doors faster for people in a hurry. In this way, our intelligent automatic door will conserve energy and make the adjustments needed to accommodate those who use it.
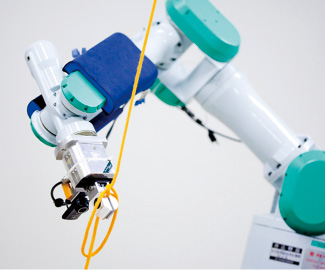
Associate Professor Kudoh has a strong research interest in how robots might learn from human behavior based on observations. This capacity would allow robots to discover and grasp the essence of a complex task by observing humans perform the task, and then mimicking the actions. One example of this research involves knot-tying. Since strings are limp, they do not necessarily retain their shape as they are being tied, even when the manipulative actions are the same. A robot may perfectly mimic a human demonstration of how to tie a string and achieve nothing close to the desired result. To tie a proper knot, a robot must learn various other essential factors, including the properties of the string as a material and how the different parts of the string pass through or wrap around each other. Explicitly programming each step of such actions would be so labor intensive it would essentially make it impossible to introduce robots to our daily lives. This explains the interest in conferring upon robots the ability to automatically learn various human skills simply by observing a human performance and identifying the essential aspects of the task.


We once constructed a robot capable of dancing the Aizu-bandaisan folk dance. We discovered that the robot’s dance can be made to appear more rhythmic to the human eye by concentrating on the motions near the “hold step” at which both movement and music temporarily stop. By teaching robots tasks based on skills in this way, it should be possible to teach them more sophisticated tasks with ease.
In the study of how to teach robots to tie knots, the sensors acquired 20,000 data points per second. However, we learned that a mere 12 suffice, as long as the human teacher can demonstrate the task in the appropriate manner. Professor Kudoh is also working on functions that will allow robots to extract these essential points automatically.
Professor Suehiro also studies robot work skills. Robots require numerous explicitly written programs to perform detailed actions. Our goal is to develop the technology required to allow robots to perform various tasks based on simple orders: for example, “Bring that over here.” We believe the best approach to achieving this capability is to provide robots with a set of reusable skill programs for the basic elemental actions underlying such tasks.
We are taking a similar approach to our study of computer vision applications-that is, the robot’s eye. Dramatic growth in processing power has made computer vision increasingly feasible as a real-world technology. However, computer vision has yet to be widely applied to the complex environments typical of daily human lives. We believe robots should be able to perform various tasks by implementing a reflex-like mechanism generated by linking a specific series of actions with specific features observed in the computer vision data. This would result in the capacity to acquire additional work skills.

All intelligent robot behavior is made scripted by specific programs, not the result of faculties enabling broader skills acquisition. While universities and research institutes have realized numerous intelligent robot functions, progress in this area has largely stalled, due mainly to differences in operating systems, programming languages, or programming approach. Our RT middleware seeks to create an RT component platform for robot functions based on standard specifications to enable users other than developers to reuse, recombine, and repurpose the functions more easily. This RT middleware technology should promote the promulgation of newly-developed robot technologies beyond the laboratory and their broader use around the world. We are also working to develop tools for RT middleware.
At our laboratory, each member contributes to the whole by drawing from their fields of specialty. This approach allows our laboratory to pursue intelligent systems research in a comprehensive manner and to effectively integrate the necessary functions for the system, including sensing, cognition, planning, moving, and task performing.
By combining this with our RT middleware, which allows efficient system construction through the componentization of these technologies, we can take a multi-faceted approach to autonomous robot development.
The discussions in this introduction to our laboratory may create the false impression that our laboratory is software-oriented. We also take great pride in our expertise in and experience with hardware technologies. Our laboratory includes an impressive and capable electrical and mechanical workshop, where we build or modify our own hardware and even build simple robots.
We hope to promote the widespread use in our daily lives of robots and intelligent systems, like those being studied at our laboratory. While these technologies should be especially beneficial for the elderly and the disabled, ideally they would help all members of society. Our laboratory looks forward to hearing from companies interested in joint research to develop robots capable of fulfilling workplace needs.