
As of August, 2015
| Faculty/Department | Department of Mechanical Engineering and Intelligent Systems Graduate School of Informatics and Engineering |

|
| Members | Masao Sugi, Associate professor | |
| Affiliations | Institute of Electrical and Electronics Engineers (IEEE); Robotics Society of Japan; Society of Instrument and Control Engineers; Japan Society for Precision Engineering | |
| Website | http://www.hi.mce.uec.ac.jp/sugi-lab/index.html | |
Cell production; production system; human workers; robots; moving trays; self-propelling; blank layout; fatigue level; quantification of fatigue; muscle potential; autonomous distributed system; autonomous decentralized control of traffic signals; coupled nonlinear oscillators; differential equation model; hand movement; face orientation; line of sight; history; conditional probability; voice from workplace; FA
Factories and other manufacturing and production workplace environments have changed dramatically over the last several decades. Thirty to forty years ago, factories installed massive production lines for automated production. In recent years, accelerating product life cycles and a shift towards small-lot production of diverse models have prompted a transition from assembly-line production using robots to cell production, in which human workers assemble products, since humans can more quickly accommodate production changes.
Worker skills become the essential factor in this strategy. This means a human-centric production system must be implemented to allow machines to assist human workers for tasks for which humans are less well suited, thereby allowing workers to focus on tasks that require human skills.
Our laboratory studies such human-centric production systems and support systems for human workers at production sites as these systems become mainstream manufacturing systems.
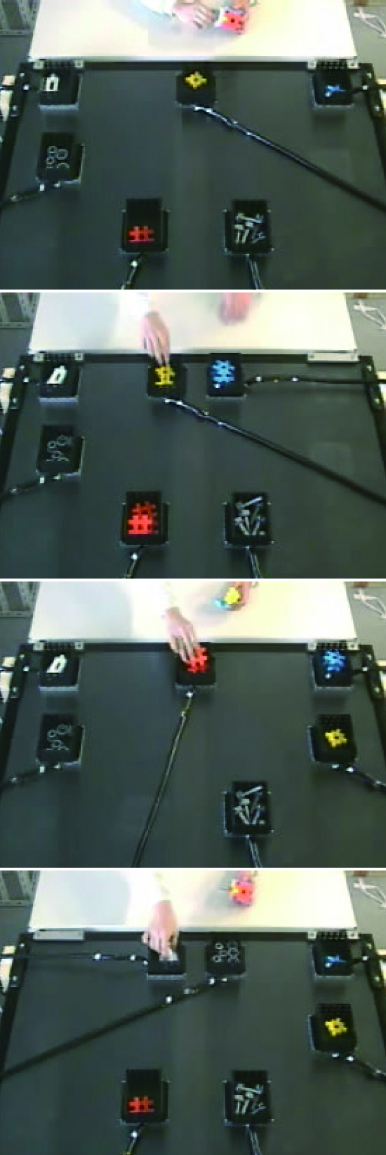
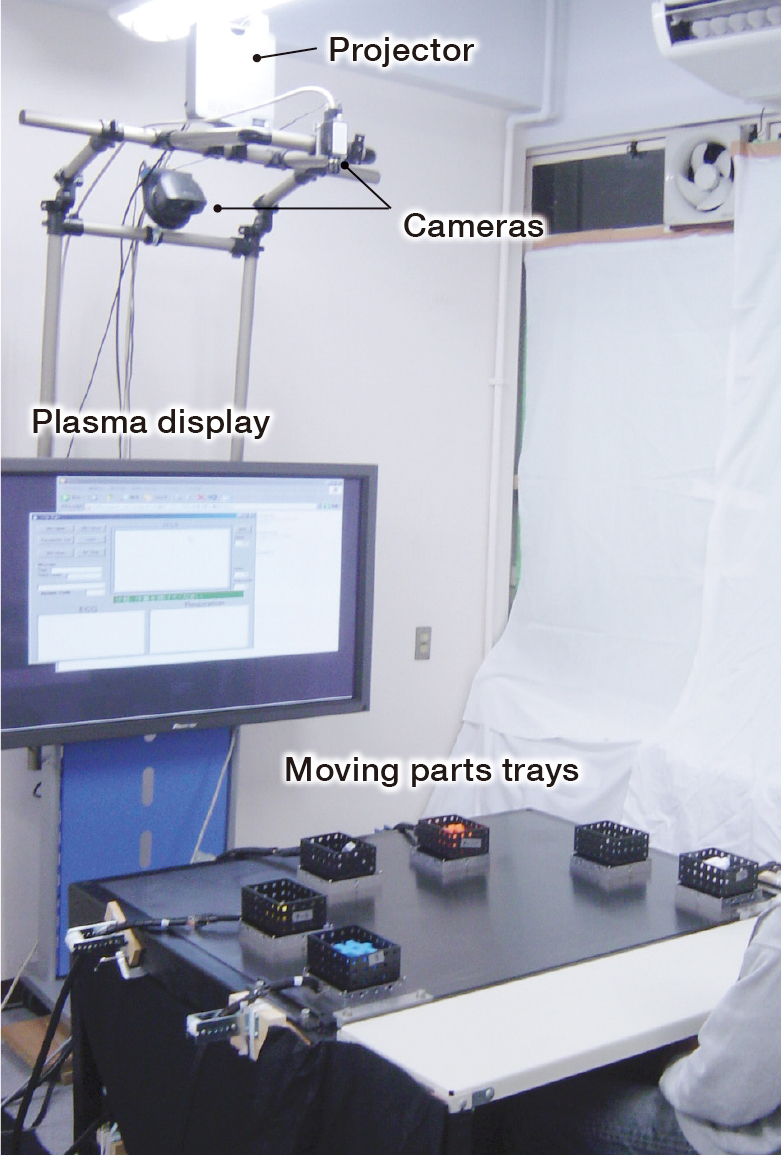
Humans are relatively ill-suited to tasks that require the retrieval of objects from shelves above a workbench, due to the time-consuming nature of the task and opportunity for error. The adoption of the moving trays developed at our laboratory can help in such situations. Workers simply give a signal indicating Next to have the tray with the component used in the next step move to and stop before the work station, eliminating incorrect component selection and increasing efficiency.
We believe this moving tray system will also be useful in homes and offices, not just in factories. However, unlike factory work, most tasks performed at a desk entail greater freedom in terms of sequence of flow. For example, writing a letter means finding stationery, an envelope, stamps, a pen, and maybe glue, but not necessarily in that or any specific order. Finding a pen either before or after the stationery has no effect on the outcome.
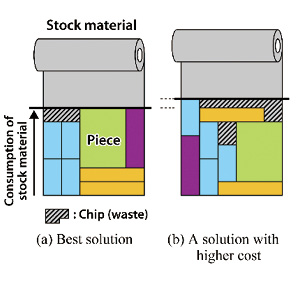
For tasks that offer such flexibility, we can establish an input interface so that users can clearly state their intentions. To realize a more intuitive process, we adopt an interface that requires users to point to or reach out to the tray they want. We are now performing a study to create a more evolved system of moving trays that will involve cordless self-moving trays. We are also engaged in another study to investigate the blank layout task performed when punching out smaller pieces from large steel plates, a real-world optimization problem for industry.
Our next project involves building a system to support workers at production sites. We are examining ways to create a safe, healthy workplace environment. We know that workers who assume the same position for an extended period of time, a common requirement in manufacturing and sales, are susceptible to work-related musculoskeletal disorders (WRMSD), such as lower back pain, stiff shoulders, and other health issues. We are developing a simple method for measuring fatigue in workers, an alternative to conventional methods that require blood sampling or other cumbersome procedures.
As part of this research, we are engaged in a joint project with the Yokoi Laboratory at our university to develop a system that quantifies fatigue based on surface muscle potential measurements, in which weak electric currents are measured on the surface of the skin as an individual works. Other preventive measures we are currently examining involve movable tables and chairs to keep the bodies of worker in constant motion, thereby preventing muscle stiffening and joint locking.
Our study of an autonomous decentralized control system of traffic signals, an application of theories in autonomous distributed systems, is a striking departure from the nature of the study described above. An ant colony is one example of an autonomous distributed system. Each ant acts only upon the information obtained from the immediate surroundings, and yet the group as a whole functions collectively and with a purpose. Identifying analogies between traffic patterns and ant communities, we attempted to create an autonomous decentralized control system of traffic signals using a differential equation model called a coupled nonlinear oscillator. By defining the interactions between the oscillators, we allow the system to prioritize heavier traffic flows.
Thus, the traffic signals at each corner can observe the amount of traffic in its vicinity and the behavior of nearby signals to systematically switchover to allow heavier traffic to pass. The signals turn green in time with the approaching traffic.
The blank layout system also reflects the workers’ perspective. The solution method for optimization problems developed by our laboratory is capable of giving optimal solutions for diverse problem settings, resulting in solutions of sufficient precision for this problem, even in cases involving large plates and numerous pieces. Studies of blank layout optimization are normally carried out as operations research (OR). We found that the settings employed in such studies are often inconsistent with actual production needs. For example, with the normal optimization solution method, there are no restrictions on how the workpieces can be positioned; in most solutions, pieces are oriented in all directions and positioned to fit like pieces in a jigsaw puzzle to minimize scrap. In actual production lines, the priority is on obtaining as many workpieces of the same shape as possible using a guillotine cutter, preferably in continuous operation. Conventional optimization solutions fail to account for such actual needs.
Our study of the quantification of fatigue takes an innovative approach. Despite extensive studies of muscles and our current knowledge and understanding of muscle behavior, fatigue, a quantity in constant flux, remains difficult to analyze or assess by non-invasive methods. These studies are further complicated by the fact that the data obtained through muscle potential calculations reflect both the muscle power exerted in a task and the extent of the worker’s fatigue.
To distinguish between these signals, we extracted signals at a specific band of frequencies and found that we could measure and analyze specific components of muscle power. Assuming that fatigue is equivalent to lower maximum achievable muscle tone, we used this data to quantify fatigue in workers performing light labor.