
掲載情報は2025年5月現在
| 所属 | 大学院情報理工学研究科 機械知能システム学専攻 |

KANAMORI Chisato |
| メンバー | 金森 哉吏 教授 | |
| 所属学会 | 精密工学会、日本ロボット学会、日本機械学会、総合コミュニケーション学会 | |
| 研究室HP | http://www.rmc.mce.uec.ac.jp/ | |
| 印刷用PDF |
メカトロニクス、計測工学、計測制御システム、知能機械学、ロボットシステム、位置角度測定、エンコーダ、外界認識センサ、安全安心センサ
メカトロニクスという言葉は、機械と電子の「機電一体化」による生産工程の自動化を進めていた1960年代の日本で生まれたとされています。その定義は幅広く、メカニクス(機械工学)、エレクトロニクス(電子工学)、インフォメーションテクノロジー(情報技術)の3つの技術を中心に、他の領域と融合しながら、自動化や省資源化、省エネルギー化、高機能化、高性能化を追究する学問分野として発展し、今も進化を遂げています。
金森哉吏教授はこの分野において、精巧なロボットシステムの構築を目指し、精密計測とロボットの技術を土台に、強みである角度計測や位置計測、画像計測などを生かし、プロトタイプの試作から実システムの開発、システム構築やオペレーション技術の開発まで、企業などと積極的に連携しながらさまざまな研究テーマを展開してきました。
金森教授は、「計測の自動化や高度化の技術にメカトロの要素を組み合わせることで、世界一や世界初の多様な技能を持つロボットを作り、それを企業や社会とともに育てていくこと」を目指しています。例えば、3次元計測・制御技術を駆使した研究として、屋内外をシームレスに移動するロボットの実現に向けた環境認識やナビゲーションシステムの技術開発があります。
移動型支援ロボットの一つである、最新の「電動車いすの運転支援システム」は、電動車いすにセンサなどを搭載することで、周囲の環境を認識し、走行時の状況に応じたナビゲーションやアドバイスを搭乗者に提案することができます。スピードの強弱による3種類の走行モードを選択でき、横断歩道や歩行者用信号などを検知しながら、安全な操縦を支援します。
環境の認識には、3次元(3D)カメラやカラー画像センサ、距離センサ、2次元領域センサなどを使うことで特徴を持つ情報を取得し、階段やでこぼこ道など段差のある場所や坂道に合わせ、速度を調整しながら電動車いすの走行制御を支援します。マンホールや水たまりなどの路面の状態や、通路上の障害物、歩行者を検知し、回避するといった高度なナビゲーションに成功しています。
人とともに行動し、人を助ける自律移動型のヒューマンアシストロボットは「盲導犬や介助犬などの代用が可能になる」と金森教授は考えています。初期に企業との共同研究で階段を自動的に認識して昇降を先導する「盲導犬型ロボット」を開発し、その後、家事を支援する家庭用サービスロボット(洗濯作業支援双腕ロボット)や直交4脚式階段昇降ロボット、ロービジョンの人のための病院内案内ロボットなどを開発してきました。現在は、車いすや歩行器を使うほどではなくても、歩行が不安定な高齢者を支援するために、ふらついたときに抱き留めてくれるロボットを開発しています。
一方、作業支援ロボットについては、食品加工作業の自動化に向け、既存のロボットアームに独自に開発したロボットハンドを取り付ける形で、食品トレーの供給ロボットや、コーンなどの粒状食品(総菜)の計量・盛り付け作業支援ロボット、食品用柔軟包装物の搬送作業支援ロボットなどの開発に取り組んでいます。
ほかにも、水害時などに床下の土砂を撤去するロボット、自律走行する草刈りロボット、水田や田んぼのまわりを囲う畦畔(けいはん)の移動に適したクローラ式ロボット、清掃ロボットなどの開発の実績もあります。
また、安全安心に関するテーマとして、商業施設のトイレの個室内で、急病などで動けなくなった人や、忘れ物などを知らせるシステムを企業と共同で開発しています。天井に設置したセンサが人やモノの動きを検出し、人の倒れ込みや残留物、長期滞在などを検知してアウトライン(輪郭)画像で通知する仕組みです。カメラのように撮影しないため、プライバシーにも配慮しています。開発したセンシングシステムは、発光ダイオード(LED)照明やスピーカー音声によって案内や警告を発し、さまざまな角度から人を見守ります。
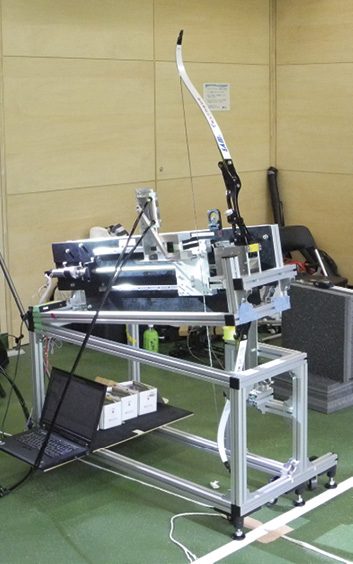
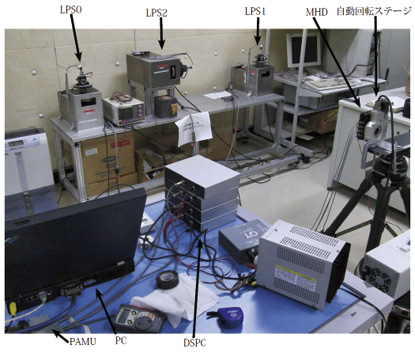
さらに、独自の技を持つロボットとして、弓で矢を射て標的を狙うスポーツ、アーチェリー競技の発展に向けて、競技用の弓具を使い、人間を模した動作で矢を発射する「アーチェリーロボット」を開発しました。人間が発射した矢は、軸周りに回転するだけでなく、矢そのものがたわみ、振動します。最新型のロボットは、70メートル先の標的に命中させることができます。また、人の矢の飛翔を再現するアーチェリーロボットを使って、弓具の評価を行うことも可能です。

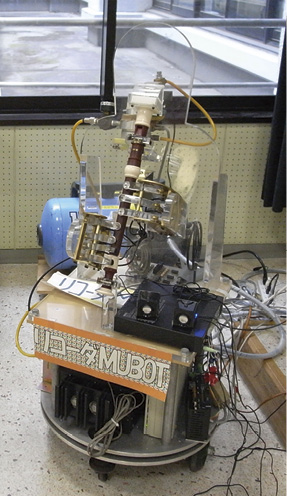
最後に、研究室では“楽器に一切手を加えない”との条件の下、演奏技法の解明や、楽器の特性評価のための演奏シミュレータの開発に加え、エンターテインメントロボットの開発を目的とした「楽器演奏ロボット-MUBOT-」の研究もしています。金森教授は特に、和太鼓やホルン、エレキベースの演奏ロボットの開発に注力してきました。

工学教育にも力を入れており、ものづくりを楽しむ力を養い、創造性を高める電気通信大学の教育プログラム『楽力教育』の推進者の一人でもあります。また、「NHK学生ロボコン」や「レスキューロボットコンテスト」をはじめ、さまざまなロボット競技やコンテストに挑戦する「ロボメカ工房」の代表世話人としても長年にわたり活動してきました。「ものづくりは情熱と技術の融合。新しいことにチャレンジする『0から1』、さらにそれを進化させ、発展させる『1から∞(無限大)』に向けて知恵と根気を持とう」と学生たちに日々伝え続けています。
【取材・文=藤木信穂】