【ニュースリリース】自動運転車両による交通渋滞評価と解決に関する新たな理論を提唱
2024.10.09
ポイント
- ・自動車の走行動作とその相互作用に基づく渋滞解析の手法を提案
- ・自動運転車両を含む交通流の渋滞に関して渋滞の先頭位置と影響範囲の特徴を可視化
- ・自動運転車両の導入による交通渋滞緩和の条件を検証可能に
概要
望月優加理客員研究員、澤田賢治准教授(i-パワードエネルギー・システム研究センター)は、自動車の走行動作と車両間の相互作用を表す「Demand-for Graph」を用いた渋滞の先頭位置と影響範囲の時間変化を評価可能な新たな渋滞解析の手法を提案しました。提案する渋滞解析手法を自動運転車両の走行によって生じる渋滞に適用し、手動運転車両による一般的な渋滞とは異なり、渋滞の先頭位置が交通流上流側で固定される特徴を持つことを明らかにしました。
渋滞の特徴の解析や影響範囲の時間変化の評価は、要因に応じたより効果的な渋滞緩和技術の開発への貢献が期待されます。
本研究成果はIEEE Access誌に掲載されました。
手法
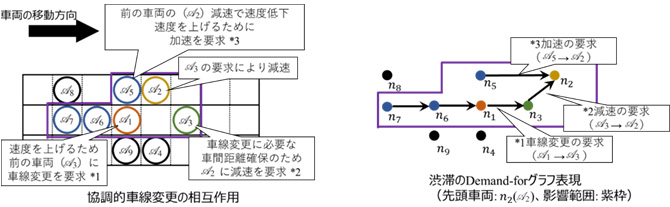
- ・本研究では、自動運転車両が後続車両の走行速度確保のために実施する車線変更(以下「協調的車線変更」)とそれによる渋滞に対して、協調的車線変更が周囲の車両に与える影響を解析し、渋滞の先頭位置と影響範囲に表れる特徴を明らかにしました。
- ・具体的には、協調的車線変更における車両の車線変更、加速、減速の現象を、車両間の走行動作と通信による相互作用をグラフ化したDemand-for Graphで表し、グラフの構造的特徴から渋滞の先頭位置と影響範囲を評価しました。
- ・図は協調的車線変更とそのDemand-for Graph表現の例です。Demand-for Graphにおいて車両はノードで表現されます。また、二つのノードを結ぶエッジは車線変更待ちや減速状態を解消するための車線変更や加速の要求状態を表します。本研究ではDemand-for Graphの端点で渋滞の先頭を表し、エッジの連結範囲で渋滞による速度低下の範囲を表しました。
- ・さらに、Demand-for Graphを制御工学で用いられる状態遷移方程式に帰着し、渋滞の発生、および時間経過に伴う影響範囲の拡大と縮小を評価しました。これにより、協調的車線変更で生じる渋滞は車線変更完了後に自然解消することを明らかにしました。また、手動運転車両による一般的な渋滞とは異なり、渋滞の先頭位置が交通流の上流側に位置し、かつ時間経過によって先頭位置が変化しないという特徴を持つことを明らかにしました。
成果
本研究では、観測範囲内の車両の台数と通過量の関係から渋滞の度合いを評価する従来の渋滞解析手法に対して、車両間の相互作用に着目し渋滞の先頭位置と影響範囲、およびその時間変化を評価可能な渋滞解析手法を提案しました。
提案する渋滞解析手法を自動運転車両による協調的車線変更で生じる渋滞に適用し、渋滞解消の条件と渋滞の先頭位置に表れる特徴を明らかにしました。これにより、協調的車線変更による渋滞緩和の効果と新たに発生する渋滞のトレードオフの評価が可能になります。
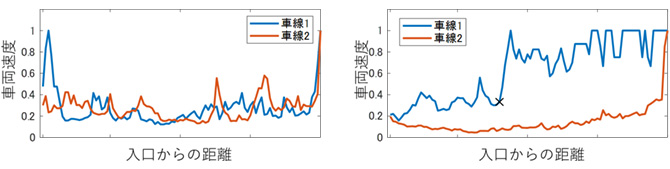
解析結果の検証として、速度の異なる二種類の車両の二車線道路での交通流に対して協調的車線変更行う自動運転車両の交通流と手動運転車両のみで構成される交通流の車両速度を比較しました。自動運転車両の交通流(下図、右)では手動運転車両のみの交通流(下図、左)と比較して、二つの車線の明確な速度差と40%以上の平均車両速度上昇が確認され、自動運転車両の協調的車線変更による渋滞緩和の有効性を確認できました。
また、自動運転車両の交通流ではバツ印を境に車両速度が大きく上昇しており、協調的車線変更で生じる渋滞に対する提案する渋滞解析手法の適用により得られた特徴を確認できました。
本研究で提案したDemand-for Graphを用いた渋滞解析は、渋滞の原因となった車両の動作に合わせて、より詳細な渋滞の特徴を論じることを可能にします。自動運転化が進む中、自動車の誤認識や誤作動によって発生するかもしれない渋滞の抑制にも繋がることになります。
今後の期待
本研究の今後の課題として、坂道での車両の速度低下や車線減少に伴う合流など、本研究の解析対象とは異なる要因で生じる交通渋滞への提案手法による渋滞解析の適用が挙げられます。
これにより、新たな自動運転技術の開発や道路網広域での渋滞予測に基づく迂回路への誘導など、スマートシティにおける高度な交通管理の実現への貢献が期待されます。
(論文情報)
論文タイトル:"Demand-for graph and its state transition expression evaluating traffic congestion due to CAVs control"
掲載誌:IEEE Access
DOI:(新しいウィンドウが開きます)10.1109/ACCESS.2024.3468622
(外部資金情報)
本研究は、科学技術振興機構(JST)戦略的創造研究推進事業(CREST)「基礎理論とシステム基盤技術の融合によるSociety 5.0のための基盤ソフトウェアの創出」領域で採択された「AI駆動型サイバーフィジカルシステムのセキュリティ評価・対策基盤(代表:森達哉(早稲田大学))」により支援を受けました。
詳細はPDFでご確認ください。