【ニュースリリース】植物で動くロボットを開発
2024.10.10
ポイント
- ・植物の成長に伴う変位と力をアクチュエータとして活用した、移動や物体の操作が可能な植物ロボットを開発した
- ・植物は地面に根を張り動かないという固定観念を、工学的な手法で移動能力を与えることで覆した
- ・これまでにない新しいタイプの、環境に優しく持続可能なロボットの実現が期待される
概要
新竹純准教授(機械知能システム学専攻)らの研究グループは、植物の成長に伴う物理的な変位と力をロボットのアクチュエータとして活用し、移動や物体の操作が可能な植物ロボットを開発しました。具体的には、カイワレダイコンをモデル植物として使用し、その成長によって生じる変位と力を解析しました。これに基づいて、移動ロボットとグリッパーの設計、製作、および解析を通した動作実証を行いました。これらの成果は、従来にない新しいタイプの、環境に優しく持続可能なロボットの実現への道を切り開くものです。
背景
急速に発展するロボット分野において、持続可能性と環境への優しさは、環境への影響を最小限に抑えながら資源を有効利用するために重要です。こうした特性をロボットに与える一つのアプローチは、土に還る材料である生分解性材料を取り入れることです。特に自然環境では、事故や故障が発生してもロボットの回収が困難な場合があり、生分解性材料はそのようなロボットに適しています。そうした観点では、環境に優しいロボットは探査やモニタリング、輸送、救助といったタスクに適していると考えられます。ロボットがこれらのタスクを実行するには、ロボットに移動や把持といった能力が必要で、機械的な出力を生み出すアクチュエータはそれを担う重要な要素です。
本研究では、環境に優しいロボットのアクチュエータとして、植物に着目しました。植物は成長によって物理的な変位を生み出し、それがアクチュエーションとして利用できます。枯れて土に還ることから、生分解性も持ちます。また、植物は太陽光や土壌といった自然環境からエネルギーを取得し、そのエネルギーをアクチュエーションに必要な形で変換する能力に優れています。言い換えれば、植物は駆動源の機能を持つアクチュエータと見なすことができます。しかし、植物の動きに関する定量的な研究は限られており、変位、力、速度などのアクチュエーション特性に関する包括的な解析は行われていませんでした。そのため、植物に基づいたロボットを設計・製作するために必要な知見が不足している問題がありました。
成果
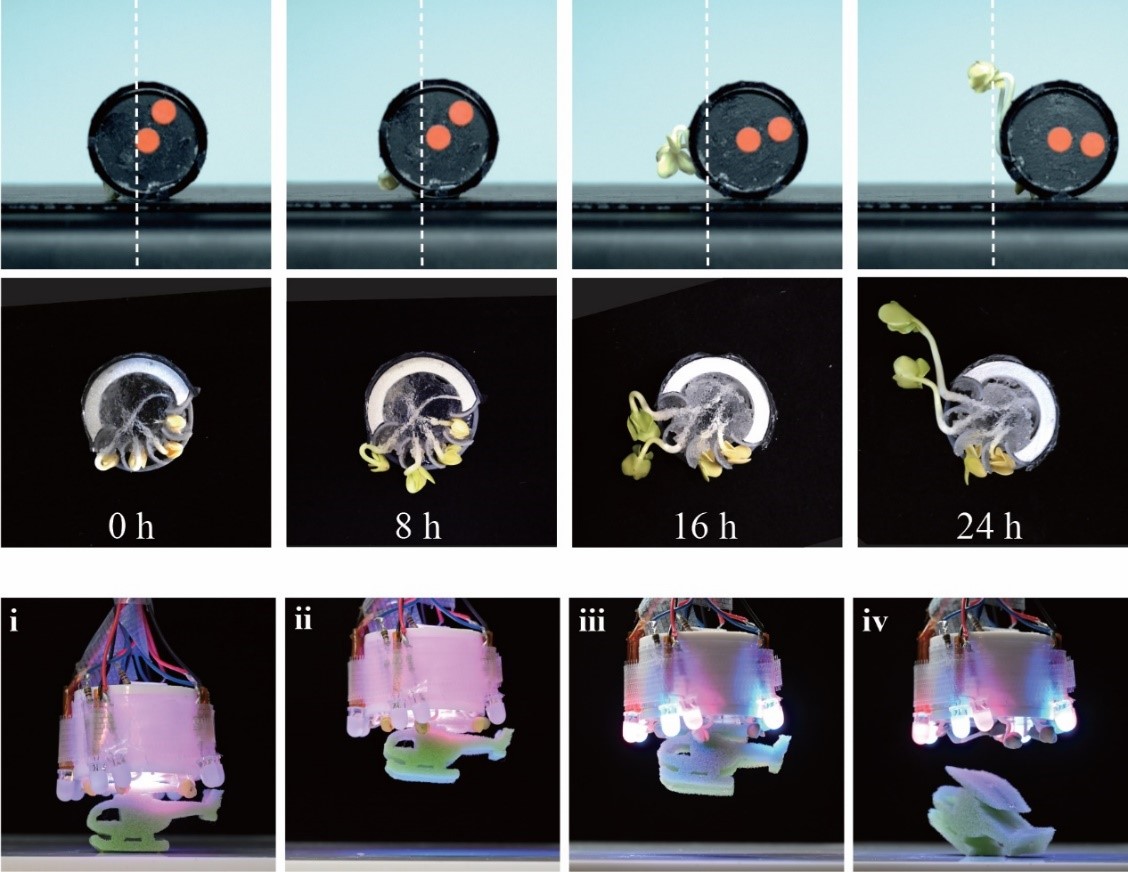
本研究では、モデル植物としてカイワレダイコンを採用し、変位、力、および速度の観点から、実験を通してアクチュエーション特性の定量化を行いました。その結果に基づいて、地上を回転移動するロボットとグリッパーの2種類のロボットを設計・製作しました。実験の結果、これらのロボットが実際に移動し、物体を持ち上げたり置いたりできることを確認しました。また、移動ロボットの挙動が、作成した解析モデルの予測値と良く一致していることも分かりました。このことは、植物のアクチュエーション特性を把握することで、植物ロボットの設計や動作の予測が可能になることを示唆しています。以上により、植物によって動くロボットが実現可能であることを実証しました。
今後の期待
植物は多種多様であり、本研究の成果を応用することで、これまでにない新しいタイプの、環境に優しく持続可能なロボットが様々な形で実現されることが期待されます。いつも通る道に生えている草が、気づかないうちにずいぶん伸びているように、周囲の注意を引かずに着実にタスクを実行する植物ロボットが、生垣といった構造物を自己構築したり、発芽と成長を繰り返したりしながら、自然環境や生態系の保護を目的に活躍する日が来るかもしれません。植物は、長いものでは数十年単位で成長します。これは、植物ロボットが従来とは異なる時間スケールで動作するシステムであることを意味しています。今後の研究の進展とともに、既存の時空間スケールにとらわれない、ロボットに関する新たな学理の創造も期待されます。
(論文情報)
掲載誌:Advanced Science
論文タイトル:"Plant Robots: Harnessing Growth Actuation of Plants for Locomotion and Object Manipulation"
著者:Kazuya Murakami, Misao Sato, Momoki Kubota, Jun Shintake
DOI:(新しいウィンドウが開きます)10.1002/advs.20240554
公表日:2024年9月24日(火)
(外部資金情報)
本研究はJST創発的研究支援事業(JPMJFR2126)の助成を受けたものです。
詳細はPDFでご確認ください。