【ニュースリリース】魚類に匹敵する性能を持つ新方式の魚ロボットを開発
2024.10.23
ポイント
- ・生物模倣型の水中ロボットの新たな駆動方法として、直接駆動方式を採用した魚ロボットを開発
- ・ロボットの遊泳速度は2.6 m/s(6.3 体長/秒)であり、実際の魚類と同等かそれ以上の速度を達成
- ・ロボットは遊泳だけでなく、現存する水中ロボットの中で最大の旋回速度となる1450 º/sのその場旋回を達成
概要
新竹純准教授(機械知能システム学専攻)、名城大学 理工学部機械工学科の池本有助准教授、東京科学大学工学院機械系の田中博人准教授らの研究グループは、生体模倣型の水中ロボットの新しい駆動方法として、直接駆動方式を採用した魚ロボットを開発しました。このロボットは、最大で2.6 m/s、速度を体長で割った値である体長比速度に直すと6.3体長/秒の速度で遊泳することが可能です。これは、実際の魚類と同等かそれ以上の速度です。また、開発したロボットは1450 º/sという高速なその場旋回も可能です。これは現存する水中ロボットの中で最大の旋回速度です。本研究の成果は、将来の水中ロボットの利用拡大と高度に先進化された移動ロボットの実現に大きく貢献することが期待されます。
背景
水中ロボットは、水中環境における作業に重要な役割を果たしており、構造物の検査、生態系の調査、資源探査、救助活動などに利用されています。生物の構造や機能を巧みに取り入れた生物模倣型の水中ロボットは、生物に匹敵する高い機動性と効率を実現する可能性を秘めており、従来よりも幅広いタスクを遂行できる、高度な水中システムの実現に道を開いています。
従来の生物模倣型の水中ロボットは、動力源として電磁モータや柔らかい人工筋肉を用いたものに大別されます。電磁モータは出力や応答性に優れますが、それを基にしたロボットは、ギアなどの追加の部品が多数用いられるため、構造の複雑化、重量の増加、および衝撃に対する耐久性の低下を招く懸念がありました。一方、柔らかい人工筋肉を用いたロボットは、単純な構造で生物のような柔軟性を持つことができますが、出力や応答性が低いという問題がありました。
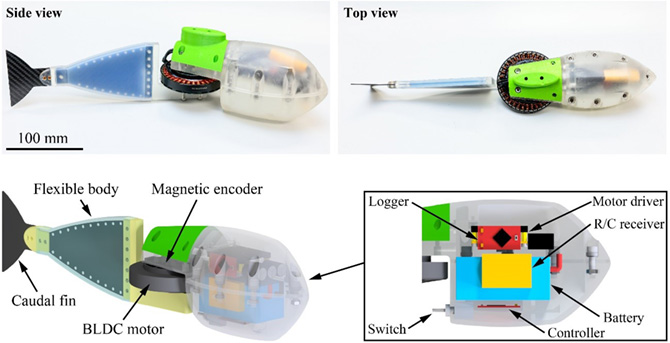
以上の問題点を踏まえ、本研究では、電磁モータによって単純で柔軟な構造を直接駆動することで高い遊泳性能が実現できるという仮説を立てました。この仮説を検証するため、生物模倣型の水中ロボットの新しい駆動方法として、直接駆動方式を採用した魚ロボットの設計・製作・解析を行いました。名前が示す通り、直接駆動方式を採ることで、ロボットの体を電磁モータで直接動かすことができるため、追加の部品が不要となり、ロボットの出力性能と機械的な耐久性の向上が期待されます。さらに、この方式ではロボットの体に柔軟性を取り入れることにより、周囲の水と相互作用して受動的に変形し、実際の魚のような動作を、複雑な制御なしに実現できることが見込まれます。
成果
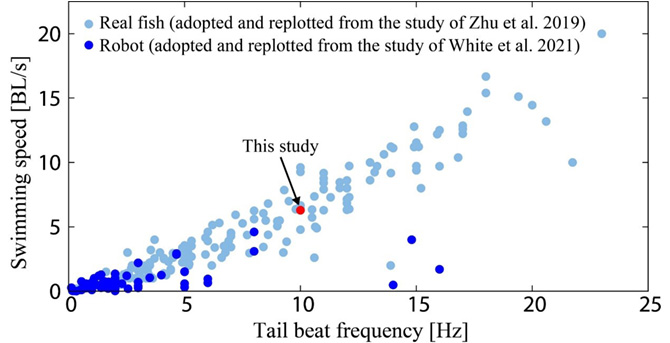
実験の結果、本研究の魚ロボットは最大で2.6 m/sの速度で遊泳することを確認しました。これは、速度を体長で割った値である体長比速度に直すと6.3体長/秒であり、既存の生物学上のデータを参照すると、実際の魚類と同等かそれ以上の性能であることが分かりました。また、直接駆動方式では、電磁モータの回転角を広く取ることができるため、体を瞬間的に大きく変形させることができます。これによって、1450 º/sという非常に高速なその場旋回を達成しました。これは現存する水中ロボットの中で最大の旋回速度です。以上により、本研究で提案した直接駆動方式が、生物模倣型の水中ロボットを高性能化する上で、有効な新技術であることを実証しました。
今後の期待
本研究の成果を応用することで、さまざまな場面に対応した多様な形態を持つ高性能な水中ロボットの実現が期待されます。それにより、水中ロボットの利用拡大に大きく貢献することが見込まれます。高速な遊泳に優れる本方式のロボットをさらに高性能化していけば、トビウオのように水中から離水して滑空することも可能になるかもしれません。つまり、遊泳だけでなく空を飛ぶこともできる、水中システムの枠を超えた、高度に先進化された移動ロボットが誕生するかもしれません。このような可能性を含め、本研究の成果は、産業だけでなく学術的にも大きく貢献することが期待されます。
(論文情報)
掲載誌:npj Robotics
タイトル:Agile robotic fish based on direct drive of continuum body
著者:Keisuke Iguchi, Taiki Shimooka, Shuto Uchikai, Yuto Konno, Hiroto Tanaka, Yusuke Ikemoto, Jun Shintake
論文URL:(新しいウィンドウが開きます)https://www.nature.com/articles/s44182-024-00014-z
公表日:2024年10月22日(火)
(外部資金情報)
公益財団法人永守財団研究助成(2021, 2022, 2023)
JSPS科学研究費助成事業(21H00324, JP18H05468, 23H03480)
JST創発的研究支援事業(JPMJFR2126)
詳細はPDFでご確認ください。