【ニュースリリース】少ないモータで多数の関節を巧みに操る「移動関節式ヘビ型ロボット」を開発~ロボティクスに関するトップ国際論文誌でBest Paper Awardを受賞~
2026.06.05
ポイント
- 少ないモータ数で多数の関節を巧みに操る、移動関節機構を備えたヘビ型ロボットを開発
- 従来のヘビ型ロボットよりもはるかに少ない電力・モータ数で、狭い空間を長時間かつ自在に移動できる自律的なヘビ型ロボットへの期待
- ロボット工学分野の著名な国際学術誌IEEE RA-Lにおいて、Best Paper Award(約1700件中5件)を受賞
概要
金田礼人准教授(機械知能システム学専攻)、東京大学大学院工学系研究科電気系工学専攻の高橋亮特任助教ら、九州大学大学院工学研究院機械工学部門の山本元司教授、中島康貴准教授らは、モータがロボット体内を移動する移動関節機構を開発し、多数の関節を少ないモータ数で操れる「移動関節式ヘビ型ロボット」を開発しました。本研究論文は国際学術誌「IEEE Robotics and Automation Letters (RA-L)」のBest Paper Award(約1700件中5件)を受賞しました。
背景
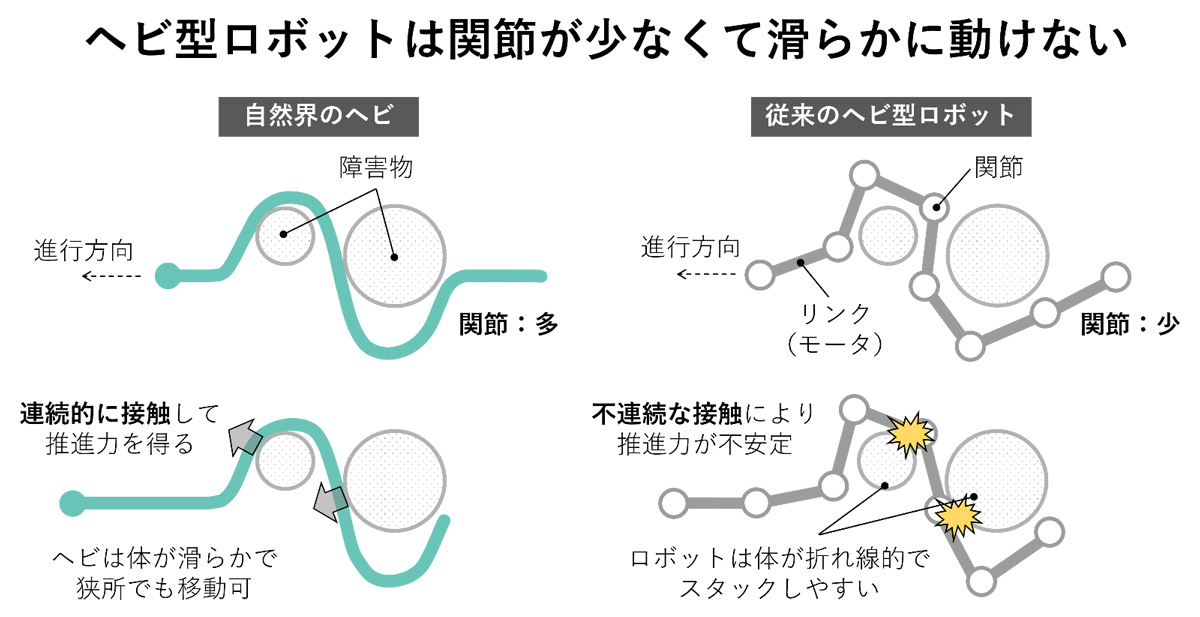
ヘビは、狭い隙間や複雑な障害物の間を、滑らかに体をくねらせながら自在に移動できます。こうした能力をロボットで実現できれば、災害現場での人命救助や、老朽化した配管内部の点検など、人が入り込めず瓦礫に溢れた場所で活躍できると期待されています。
しかし現在のヘビ型ロボットは、本物のヘビほど自由には動けません。最大の理由は、「関節の数」の違いにあります。生物のヘビは数百もの椎骨(背中の骨)を持つ一方、一般的なヘビロボットの関節数は十数個程度しかなく、動きが折れ線状になってしまうためです。
一方で、単純に関節を増やそうとすると、モータや配線の数も増え、ロボットが極めて重くなってしまいます。つまり、「滑らかに動かしたい」と「軽く作りたい」を同時に満たすことが難しいという課題がありました。
手法
研究グループは、この課題を解決するため、「必要な場所へ関節機能を移動させる」という新しいロボット機構を開発しました。
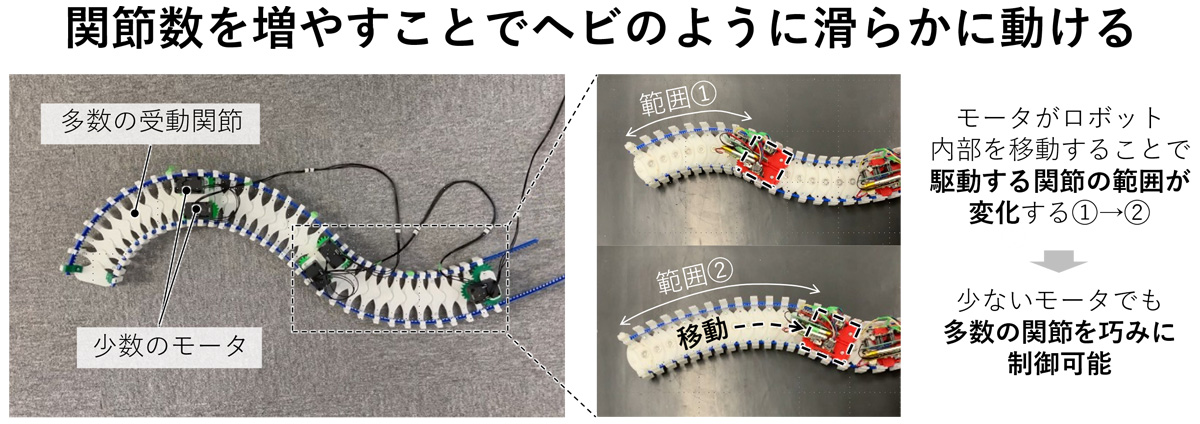
従来のロボットでは、モータは各関節に固定されていました。一方、今回開発したロボットでは、「モータを固定せず、ロボットの中を移動できるようにする」という新しい仕組みを導入しました。
たとえば、ロボットの前方を曲げたいときには前方へ、中央を曲げたいときには中央へと、モータ自体が内部を移動しながら、その場所で体を曲げます。これにより、少ないモータ数でも、多数の関節を持つヘビのような滑らかな動きを実現しました。
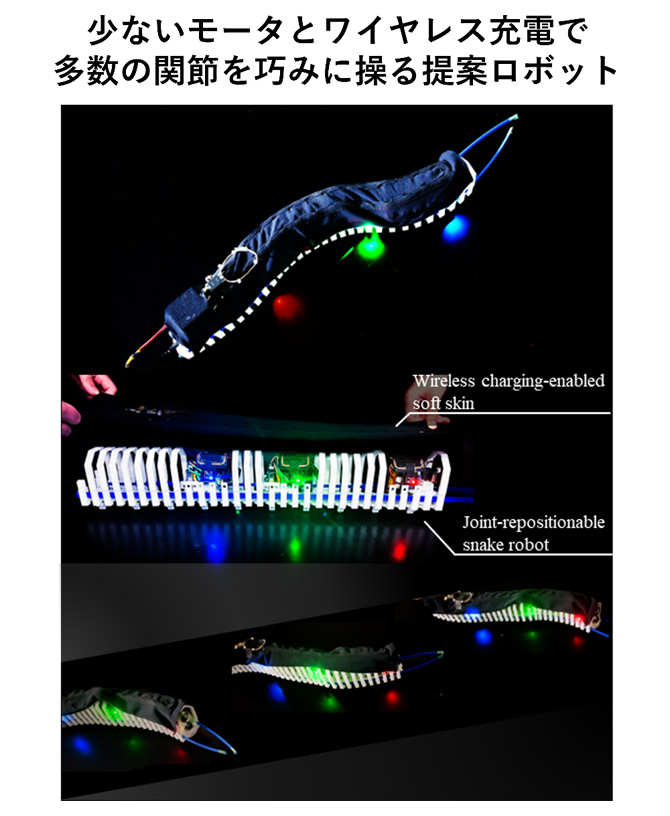
さらに、モータの配線が動作を妨げないよう、柔軟な外皮にワイヤレス無線充電機構を搭載したソフトロボットスキンを開発しました。これにより、移動するモータへ給電用のワイヤーを繋げずとも、非接触に給電できます。
参考動画~Joint-repositionable Inner-wireless Planar Snake Robot
成果
開発したロボットは、わずか5つのモータで40個の関節を巧みに操り、多関節ロボットのような滑らかな蛇行運動を実現しました。具体的には、総重量1.3 kgの軽量設計と7.6 Wという低電力での安定したワイヤレス駆動を達成しました。
さらに、障害物を単に避けるのではなく、周囲の壁や突起に身体を押し当て、その反力を利用して前進する「障害物利用移動」にも成功しました。特に、小さな障害物が並ぶ複雑な環境においても、滑らかに接触状態を維持しながら安定して移動できることを実証しました。
また、関節密度を高めた構造では、従来型ロボットで発生しやすかった"引っかかり"や停止(スタック)が大幅に抑制されることも確認されました。
本成果は、ロボティクス分野のトップ国際論文誌 IEEE Robotics and Automation Letters に掲載され、このたび約1700件の論文の中から5件のみ選出される「Best Paper Award」を受賞しました。 本技術は、災害瓦礫内部の探索、配管・インフラ点検、工場設備の保守など、狭く複雑な環境で活動する次世代ロボットへの応用が期待されます。
今後は、三次元的に動作するロボットへの拡張や、AI・強化学習を組み合わせた自律制御技術の開発を進める予定です。
2026年6月4日(木)に開催されたIEEE RA-L Best Paper Award授賞式


(論文情報)
〔IEEE RA-L Best Paper Award 受賞論文〕
雑誌名:IEEE Robotics and Automation Letters (RA-L)
タイトル:Joint-repositionable Inner-wireless Planar Snake Robot
著者:A. Kanada†*, R. Takahashi*, K. Hayashi, R. Hosaka, W. Yukita, Y. Nakashima, T. Yokota, T. Someya, M. Kamezaki, Y. Kawahara, M. Yamamoto
(†: Corresponding author, *: Co-first author)
出版情報:Vol. 10, No. 5, pp. 4994-5001, 2025(2025年3月27日出版済)
DOI:10.1109/LRA.2025.3555394
詳細はPDFでご確認ください。