東郷研究室「ヒト型ロボットによる身体知の解明」の研究を応援する
ヒト型ロボットで解き明かす、身体運動のしくみ
-
設置趣旨
東郷研究室の紹介
私たち東郷研究室は、ロボットを通じてヒトの身体に秘められた「巧みな動きを生み出す源泉」を解き明かす研究を行っています。人体構造を忠実に再現したヒト型ロボットを開発することで、人間が持つ器用で巧みな運動の秘密を明らかにし、さらにはそれをロボットや義手として社会に役立てることを目指しています。
私たちが開発する「人体模倣ロボット」は、ヒトの骨格や筋肉の緻密な模倣の試行錯誤を重ねることで、人体の持つ「設計図」を明らかにするリバースエンジニアリングを行っています。人体構造のどの部分がどのような機能を持ち、なぜそのような構造になっているのかを解き明かすことで、新たなロボット技術の進歩に貢献しています。一方で、「人体規範ロボット」は、抽出された人体の優れた機能を実用的なロボットへと応用し、障がいを持つ方々の生活を支える電動義手として実用化を進めています。
東郷研究室には、未来のロボット開発や日本の産業を担う学生が集まり、互いに切磋琢磨しながら日々情熱をもって研究に取り組んでいます。そこでは、ロボット学、機構学、バイオメカニクス、神経科学、生理学、解剖学、計測工学、統計学、信号処理、機械学習などの多くの学問領域、ロボット実機の製作やプログラミング、電子工作などの多くのスキルを身につけています。3D-CAD、3Dプリンタを用いたデジタル開発技術を駆使しながら、実践的で高度なスキルを身につけ、世界をリードする人材へと成長しています。
しかし、このような挑戦を支えるには多くの材料や設備、実験環境が必要です。また、既存の資金だけではカバーできない、学生の新しい挑戦を応援する環境づくりにも皆さまからのご支援が必要です。
東郷研究室の取り組み
- 人体模倣ロボットによる革新的な科学研究
東郷研究室では、指や手、手首や肩、足などの人体構造を忠実に再現した人体模倣ロボットを作成しています(図1)。これらのロボットはヒトの身体構造の神秘を解き明かし、ロボット学の進歩に貢献しています。具体的な研究成果としては、硬い皮膚と柔らかい皮下組織の二層構造が精密把持の安定性を向上させること[1]や、指の末節骨の非対称形状が把持性能を高めること[2]などが明らかになっています。さらに硬い爪と柔らかい指腹の相互作用による精密な物体把持能力の向上[3]、手首の骨格形状と緩結合構造が生み出す適応的剛性調整機能、複数の骨が靭帯で繋がった足部構造の粘弾性変化など、新たな知見が次々と得られています。
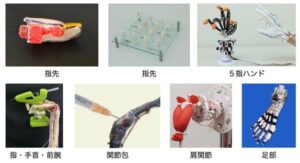
図1:東郷研究室で開発している人体模倣ロボット
- 義手技術の革新で、障がいを超えた未来を創造
肩から腕を失った方々のために、軽量で高性能、安全で直感的に操作できる電動肩義手を開発しています。具体的な成果として、離断者の方が簡易型筋電肩義手を用いて壁に貼り付けたボールを掴んで移動できるようになったり[4]、MRデバイスとの連携により操作速度を大きく向上させたり[5]しました。また、現在はヒトと同等の自由度を備えた多自由度電動肩義手の開発に注力しており、国内外で高く評価されています[6]。

図2:東郷研究室で開発している電動肩義手
- 若い世代を育てるロボット作成体験講習会
中高生向けに無料で人体模倣ロボット作成講習会を開催し、大学での研究開発を体験してもらうとともに、未来のロボット技術者を育成しています。講習会では、参加した中高生たちが3時間を超える集中力でロボットを組み上げ、完成させたロボットを自宅に持ち帰ることができます。アンケート結果でも非常に高い満足度を示しており、若者の好奇心を刺激し、次世代のロボット工学を支える人材育成に成功しています。

図3:人体模倣中指ロボットの作成体験会
寄付金の使途
皆さまからいただいた寄付金は、次の目的で大切に活用させていただきます。
- ヒトの身体構造と運動機能の関係を解明する人体模倣ロボットの研究開発費用
- 日常生活を支える電動義手の研究開発費用
- 中高生向け人体模倣ロボット作成体験会の運営費用
- 学生が挑戦的な研究を行うための活動支援費用
皆さまのご支援が、ロボット学の未来を切り拓く大きな力になります。
ぜひ、東郷研究室の挑戦を応援してください。
関連リンク
研究室公式HP:http://www.hi.mce.uec.ac.jp/togolab/
研究室公式X:https://x.com/togo_lab/
研究室公式Instagram:https://www.instagram.com/togolab_uec/
研究室公式YouTubeチャンネル:https://www.youtube.com/channel/UC10spcvW8-pCTLKy5rrDHyw
河合塾みらいぶっく学問・大学ナビ:https://miraibook.jp/researcher/k23049
これまでの成果の一例
[1] 小畑 承経,熊谷 あやね,矢吹 佳子,東郷 俊太,姜 銀来,横井 浩史,”動的安定把持を実現する電動義手のための二層弾性構造グローブの開発”,日本ロボット学会誌,Vol. 39,No. 8,pp. 744–750,2021.doi: 10.7210/jrsj.39.744
[2] Ayane Kumagai, Yoshinobu Obata, Yoshiko Yabuki, Yinlai Jiang, Hiroshi Yokoi, Shunta Togo, “Asymmetric shape of distal phalanx of human finger improves precision grasping,” Scientific Reports, Vol. 11, No. 10402, pp. 1–10, 2021. doi: 10.1038/s41598-021-89791-3
[3] Ayane Kumagai, Yoshinobu Obata, Yoshiko Yabuki, Yinlai Jiang, Hiroshi Yokoi, Shunta Togo, “Improvement of precision grasping performance by interaction between soft finger pulp and hard nail,” Soft Robotics, Vol. 10, No. 2, pp. 345-353, 2023. doi: 10.1089/soro.2021.0231
[4] Susumu Kimizuka, Yohei Tanaka, Shunta Togo, Yinlai Jiang, Hiroshi Yokoi, “Development of a shoulder disarticulation prosthesis system intuitively controlled with the trunk surface electromyogram,” Frontiers in Neurorobotics, Vol.14, No.542033, pp.1–10, 2020. doi: 10.3389/fnbot.2020.542033
[5] Shunta Togo, Kazuaki Matsumoto, Susumu Kimizuka, Yinlai Jiang, Hiroshi Yokoi, “Semi-automated control system for reaching movements in EMG shoulder disarticulation prosthesis based on mixed reality device,” IEEE Open Journal of Engineering in Medicine and Biology, Vol. 2, pp. 55–64, 2021. doi: 10.1109/OJEMB.2021.3058036
[6] Yuko Nakamura, Yinlai Jiang, Hiroshi Yokoi and Shunta Togo, “Development of a 7 DOF electric shoulder disarticulation prosthesis using a return routing tendon driven mechanism,” 2022 IEEE 4th Global Conference on Life Science and Technologies (LifeTech2022), pp. 142–143, Osaka, Japan, 7-9 Mar. 2022. IEEE LifeTech 2022 Excellent Paper Award for Demo Presentation


