
研究室紹介OPAL-RING
広田 研究室
VR空間で「手」を使う
| 所属 | 大学院情報理工学研究科 情報学専攻 |
|---|---|
| メンバー | 広田 光一 教授 |
| 所属学会 | 日本バーチャルリアリティ学会、電子情報通信学会、ヒューマンインタフェース学会、日本音響学会 |
| 研究室HP | http://www.hirota.lab.uec.ac.jp/ |
| 印刷用PDF |
掲載情報は2017年3月現在

- 広田 光一 Kouichi HIROTA
- キーワード
-
触力覚提示、バーチャルリアリティ、ヒューマンインタフェース
近年、VR(仮想現実感)技術が再びブームを迎えています。現在では、頭部に装着するヘッド・マウント・ディスプレー(HMD)を使った視覚的なVRの提示手法がその開発の中心になっていますが、広田光一教授によれば、「VRの概念が提案された20年ほど前は、『手を使う』ことが当然のように想定されていた」そうです。
広田教授は、現状では実用性に課題があるこの「VR空間における手を使った操作」の実現を目指しています。現実と同じように手を使うことのできるVR空間の構築を目標とし、特に、「手をつくる」「手を測る」「手で触る」「手を使う」という四つのアプローチで研究を進めています。
手を高精度に計測

- 爪にセンサを取り付けた様子
まずは手を「つくる」、すなわち、手をモデル化することがその前提となりますが、モデルをつくるためには、手を「測る」ことが必要です。広田教授は、骨と密着していることから、最も安定的に手の動きを測れる手の爪と、手の甲の計6カ所に磁気センサを貼り付けて手を計測しました。
センサによって、手の位置と姿勢が分かるため、これによって手の骨全体の曲げ角を推定できます。広田教授が提案したこの手法は、平均誤差が2ミリメートル以内と小さく、従来の手にはめるグローブ型のセンサより高い精度で手の形状をリアルタイムに計測できるようになりました。
モデル化する
この手を「測る」技術を基にして、広田教授は、手の柔らかい皮膚の変形まで考慮できる柔軟な手モデルの構築に取り組みました。その結果、骨が皮膚に対して固定の境界条件を持ち、かつ皮膚と皮膚が触れる物体との接触力を計算できる手モデルが完成しました。
このようにして、物を持ったり触れたりした時の皮膚の変形を、初めてリアルタイムにVR空間上で精度良く表現できるようになりました。これが手を「つくる」技術です。広田教授は、「『VR画像としての手』に皮膚のシワやくぼみまで表現することは、見た目の“それらしさ”だけでなく、物体の操作にも重要だ」ととらえています。

- 柔らかい皮膚を持つ手モデル
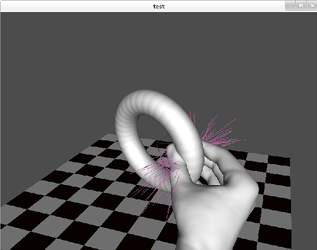
- 皮膚の変形を落とし込んだ手モデル
手を「測る」技術には、ユーザ自身の手を忠実に再現するという研究もあります。手のひらや指の長さなどは個人差があり、個人にカスタマイズされた手をVR空間上に写し出すことができれば、手モデルの動きの精度も高められます。広田教授は今後、磁気共鳴断層撮影装置(MRI)などの非侵襲な計測法を使って手の3次元モデルをつくり、「将来はオーダーメイドの手モデルを簡単に作れるようにしたい」と考えています。
実空間にフィードバックする触力覚デバイス
一方、逆にVR空間内での動作や振る舞いを実空間にフィードバックするためには、実空間において、人間の身体に触覚や力覚を与えることが有効です。これが手で「触る」技術です。広田教授は、空気圧によって手指に力を提示する微小な風船型の触覚デバイスを開発しました。
5本の指に各16個、計80個のデバイスを取り付け、それぞれを独立に制御します。これで、例えばVR空間内で物をつかむ動作などを行うと、デバイスを通じて実際に物を触ったような感覚が手に伝わる仕組みです。風船は高密度に配置できるため、手の広い領域に触覚を与えられるだけでなく、電気刺激や振動子などの従来手法では出しにくかった、「実際の力に近い“押されたような感覚”を提示できる」そうです。
このほか手の代替として、足など他の部位に触力覚を提示する技術も開発しています。これは、足などで代わりの感覚を得ながら、手は自由に動かすことができるという点でメリットがあります。

- 風船型の触覚デバイス

- 足裏に触力覚を提示する試作装置
柔らかい物体をVRの手で操作する
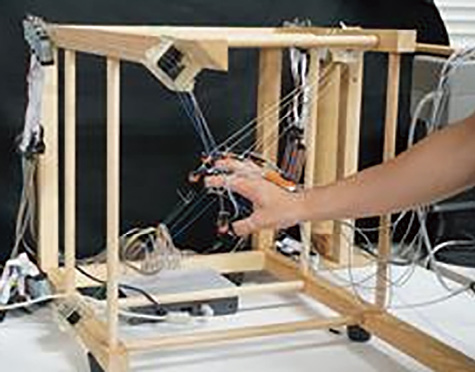
- 右手の5指へ力覚を提示するデバイスなども開発
今後は、手を「使う」研究にも発展させていく予定です。ここでは応用のニーズによってさまざまな題材が考えられますが、硬い物体をつかむことはもちろん、柔らかく変形しやすい物体の操作や遠隔での物体操作の補助なども、将来は可能になるかもしれません。
こうした研究によって、最終的に現実と同じような形でVR空間の手を自在かつ巧緻に操れるようになれば、「人間の能力をより深く理解することにつながる」と広田教授はとらえています。精緻な手モデルおよびその器用な操作性の実現と、手の動作メカニズムの解明は、実は、科学においては表裏一体のテーマになっているのです。
【取材・文=藤木信穂】