【ニュースリリース】力強くも繊細なロボット駆動の新技術を開発 -多様な接触を模擬した実験で高性能を実証-
2023年05月08日
ポイント
*ハイブリッド駆動をロボットに組み込む際の基本課題を解消する新技術
*2つのアクチュエータを融合する「融合型ハイブリッド」という設計コンセプトを確立
*本コンセプトに基づいて空気と電気のアクチュエータを評価するベンチマークを提案
*従来アクチュエータに比べ、接触点への外乱に対する一定押しつけ力の維持能力が大幅に向上
概要
仲田佳弘准教授(機械知能システム学専攻)と野田智之主幹研究員(国際電気通信基礎技術研究所脳情報通信総合研究所)は、駆動原理の異なる2つのアクチュエータを相補的に用いることで優れた特性を実現するハイブリッド駆動がロボットに組み込みにくいという基本課題に注目し、この課題を解決する新技術を開発しました。具体的には、複数のアクチュエータのエネルギーを力に変換する構造を融合させ、あたかも1つのアクチュエータのように内部で力を合成する、新しい直動アクチュエータの設計コンセプト「融合型ハイブリッド直動アクチュエータ(FHLA: Fusion Hybrid Linear Actuator)」を確立しました。この設計コンセプトに基づき、空気圧シリンダとダイレクトドライブのリニアモータを融合させたアクチュエータは、空気または電気のみを動力源とする場合と比較して、動きの外乱に対して、広い力の範囲で一定の押しつけ力を維持する能力が大幅に向上したことが実験で示されました。この実験結果により、従来のアクチュエータよりも接触点における動きの外乱に対して優れた力制御性能を持つことが示されました。本研究は、メカトロニクス分野のトップジャーナル「IEEE/ASME Transactions on Mechatronics」に掲載されました。
手法
本研究では、融合型ハイブリッド直動アクチュエータ(FHLA:Fusion Hybrid Linear Actuator)という新たなアクチュエータの設計コンセプトを確立しました。FHLAは、2つのアクチュエータの出力を1つの筐体内で融合させる点で、従来のハイブリッド駆動のコンセプトとは異なります。このコンセプトで実現した直動アクチュエータは、空気と電気の2つの駆動源を使用しているものの、あたかも1つのアクチュエータのようにロボットに組み込むことができます。このコンセプトに基づき、これまで組み合わされてこなかったダイレクトドライブの空気圧シリンダとリニアモータを組み合わせて、合成された力をとりだす独自の構造を実現しました(図1)。また、空気圧シリンダのピストンで発生する摩擦力の予測の精度を向上するモデルを開発し、このモデルで推定した摩擦をリニアモータで打ち消し、任意の一定力を維持する力制御システムを開発しました。
これまでのハイブリッド駆動の研究では、位置の制御性の向上に関する評価が多く、接触点における力の特性の評価が十分に検討されていませんでした。特に、研磨やマッサージで必要とされる、任意の表面に沿って移動しながら一定の押しつけ力を維持する能力を評価する指標は開発されていませんでした。そこで、本研究では、アクチュエータの先端の接触点に動きの外乱が加わる状況で、一定の押しつけ力を維持する能力を評価するための新たなベンチマーク(Maintaining contact force constant (MCFC) benchmark)を提案し、先端を様々な形状の表面に押しつける際に生じる動きの外乱を模擬する実験装置(図2)を開発しました。具体的には、図2の右のアクチュエータを位置制御して外乱を加えることで、提案するアクチュエータの性能を評価しました。この実験で、広い力の範囲で一定の押しつけ力を維持する能力が大幅に向上したことが実験で示され、従来のアクチュエータよりも接触点における動きの外乱に対して優れた力制御性能を持つことが確認されました。
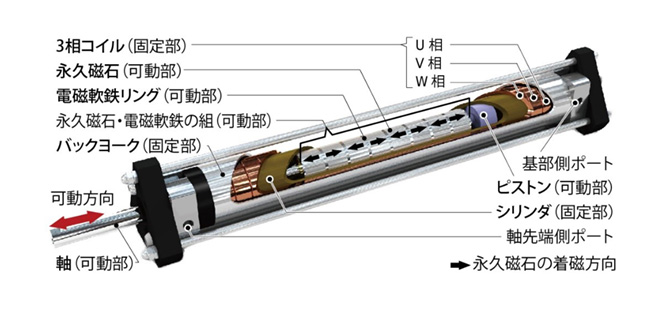
図1:アクチュエータの内部構造
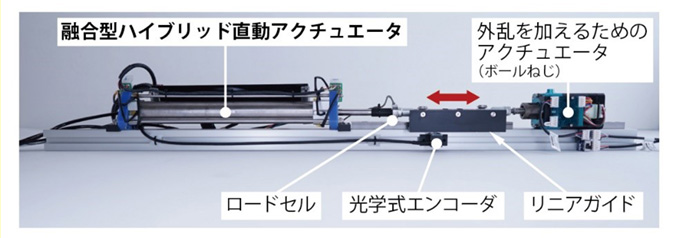
図2:評価実験装置
成果
次に本研究では、2つ以上のアクチュエータの可動部を直接接続して力を合成し、なおかつ可動空間を共有させる設計コンセプトを示しました。このコンセプトに基づく直動アクチュエータを新たに融合型ハイブリッド直動アクチュエータ(FHLA)と名付けました。本設計コンセプトにより従来のハイブリッド駆動のための力の合成が、1つの筐体に融合されたアクチュエータの中で行われるため、ロボットに組み込みにくかったという基本課題が解決できます。今回、このコンセプトに基づき、空気圧シリンダとリニアモータをハイブリッド化させた空電ハイブリッドアクチュエータは、バックドライバビリティの高い2つのアクチュエータであるため、ハイブリッドアクチュエータ自身も高いバックドライバビリティを有しており、人や環境との安全な接触が可能です。また、本研究ではこのアクチュエータの力制御も実現し、空気のみを動力源とする場合と比較して、一定の押しつけ力を維持する能力が大幅に向上したことが示されました。実験では、電気のみを駆動源とする場合には、実現が難しい範囲まで押しつけ力を設定することで、電磁力で駆動する場合に対する優位性も示しています。以上から、FHLAのコンセプトに基づくアクチュエータは従来の空気圧アクチュエータや電磁アクチュエータに比べ、押しつけ方向に生じる接触点の様々な動きの外乱に対して、押しつけ力を一定に維持できる性能が高いことが示されました。
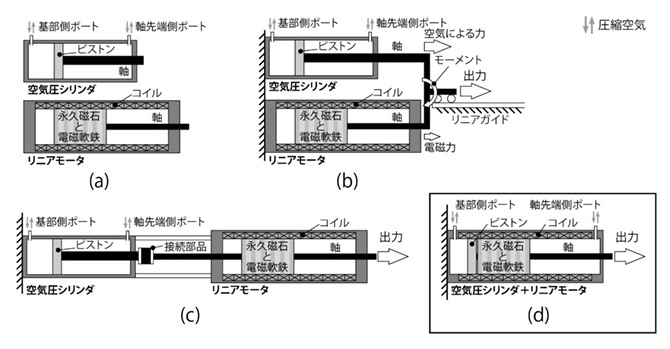
図3:設計コンセプトの比較
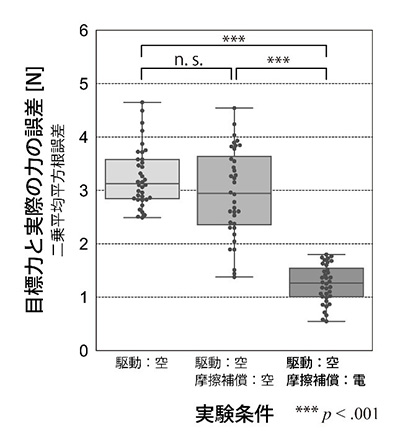
図4:実験結果
(論文情報)
著者名:Yoshihiro Nakata and Tomoyuki Noda
論文名:Fusion Hybrid Linear Actuator: Concept and Disturbance Resistance Evaluation
雑誌名:IEEE/ASME Transactions on Mechatronics
DOI:10.1109/TMECH.2023.3237725
公表日:2023年3月28日(火)
(外部資金情報)
本アクチュエータ技術の研究開発の一部は、科研費 基盤研究(A)(JP21H04911)、若手研究(A)(JP17H04698, JP15H05321)、挑戦的萌芽研究(JP26540134)の支援を受けて行いました。また、本研究の一部はAMED(JP21he2202005, JP22he2202017)の支援を受けて行いました。
詳細はPDFでご確認ください。